und
und 



Mit der Mission Planner Der Vorgang ist äußerst einfach, die Anweisungen sind die gleichen simpleRTK2B2B, simpleRTK2B2Blite (u-blox ZED-F9P) und simpleRTK3B (Septentrio Mosaic X5) Empfänger.
- Offen Mission Planner und verbinden Sie sich wie gewohnt über den COM-Port mit Ihrem Autopiloten.
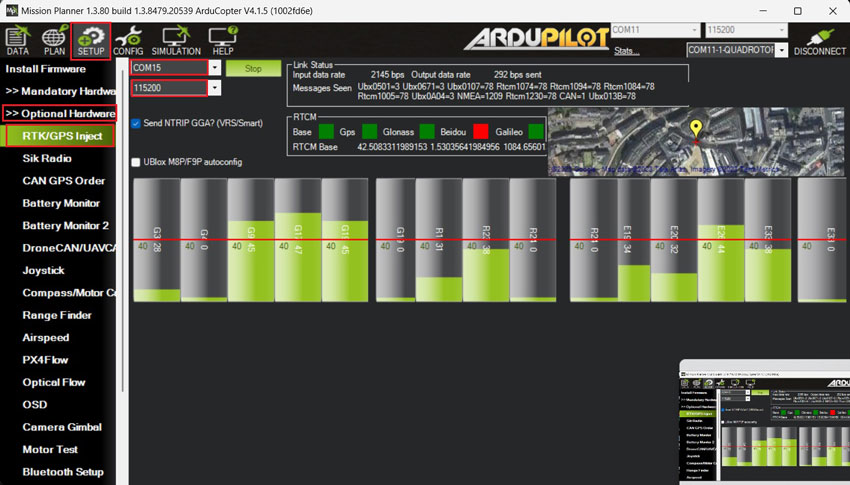
- Gehen Sie zu SETUP->Optionale Hardware->RTK/GPS-Inject.
- Wählen Sie den COM-Port aus, mit dem Ihre GNSS-Basisstation verbunden ist, und stellen Sie die richtige Baudrate ein. Drücken Sie Vernetz Dich.
- Jetzt können Sie Ihr Heading-Kit mit Ihrem Autopiloten verbinden, indem Sie der Anleitung folgen Wie verbinden simpleRTK2B2B Auf dem Weg zu ArduPilot mit externem RTK Korrekturen?
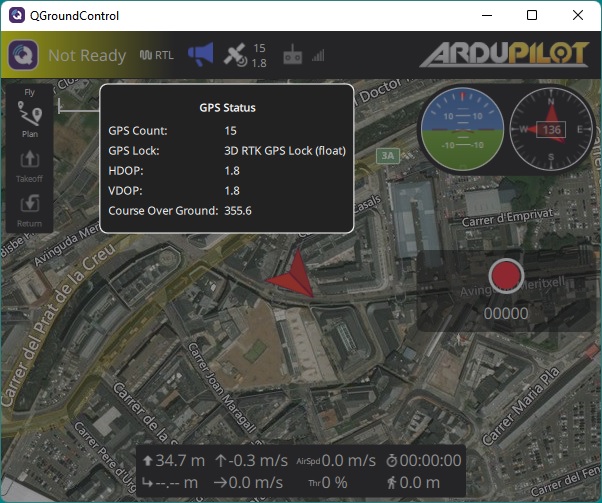
Gehen Sie dann zurück zum Hauptbildschirm von Mission Planner. Hier sehen Sie sowohl die Position der Basisstation als auch Ihre Ardupilot GNSS-Position.

QGroundControl erkennt automatisch beide simpleRTK2B2B und simpleRTK3B Bretter (nicht simpleRTK2B2Blite), über USB an denselben Computer angeschlossen, auf dem QGroundControl ausgeführt wird.
Es konfiguriert automatisch den Empfänger und beginnt mit dem Streaming von Korrekturen an den GNSS-Empfänger, der auf dem Autopiloten montiert ist.
Wir haben die automatische Konfiguration getestet und das Verhalten ist nicht immer das erwartete. Daher zeigen wir in diesem Tutorial eine alternative Methode, die ebenfalls unterstützt simpleRTK2B2Blite-Empfänger als Basisstationen und funktioniert 100 % der Zeit.
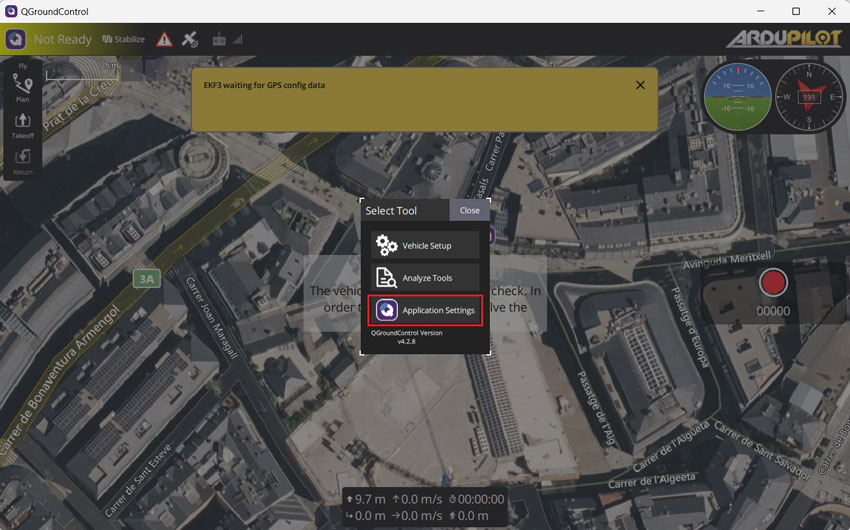
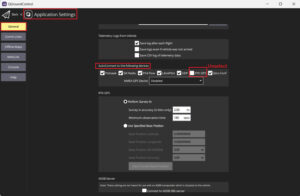
- Öffnen Sie QGroundControl und drücken Sie Anwendungseinstellungen im Hauptmenü.
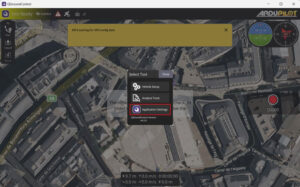
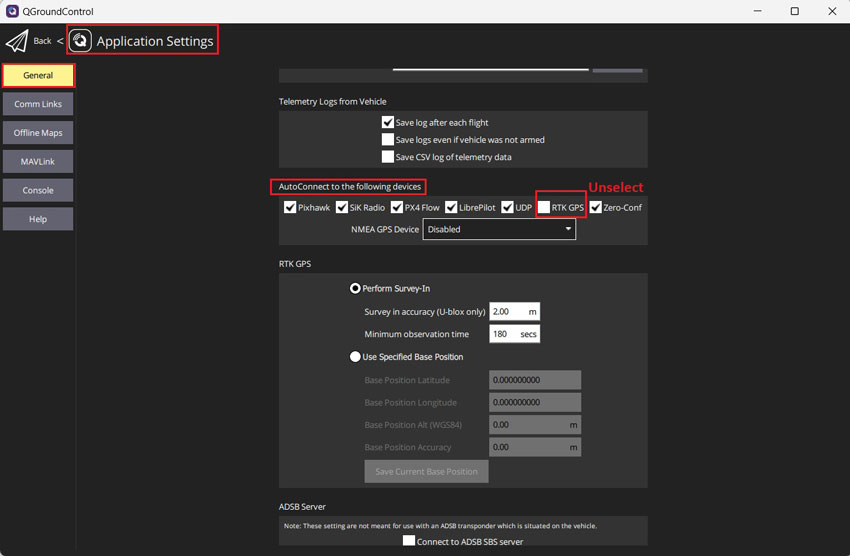
- Gehen Sie zu Allgemeines->Automatische Verbindung zu den folgenden Geräten->Auswahl aufheben RTK GPS.
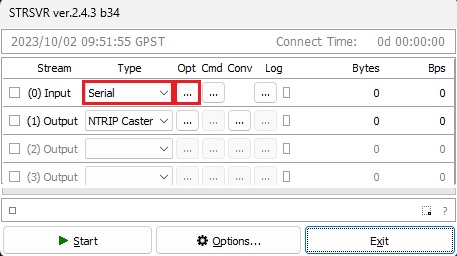
- Führen Sie die STRSVR-Anwendung aus. Wählen (0) Eingabe as Seriell Port, klicken Sie Opt … .
- Sept Hafen an den COM-Port Ihrer GNSS-Empfänger-Basisstation.
Sept Bitrate (bps) Um die Baudrate Ihres GNSS-Empfängers anzupassen, klicken Sie auf OK.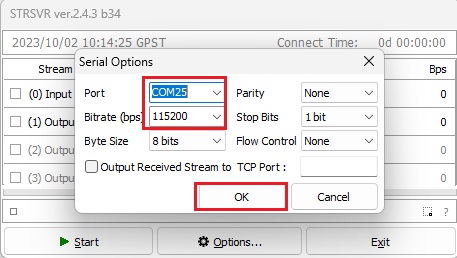
- Auswählen (1) Ausgang as NTRIP Caster, klicken Opt … .
- Sept HafenZum Beispiel 2101.
Sept EinhängepunktZum Beispiel TESTEN.
Sie können Benutzer-ID und Passwort leer lassen, klicken Sie auf OK.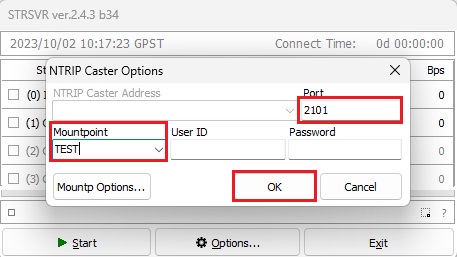
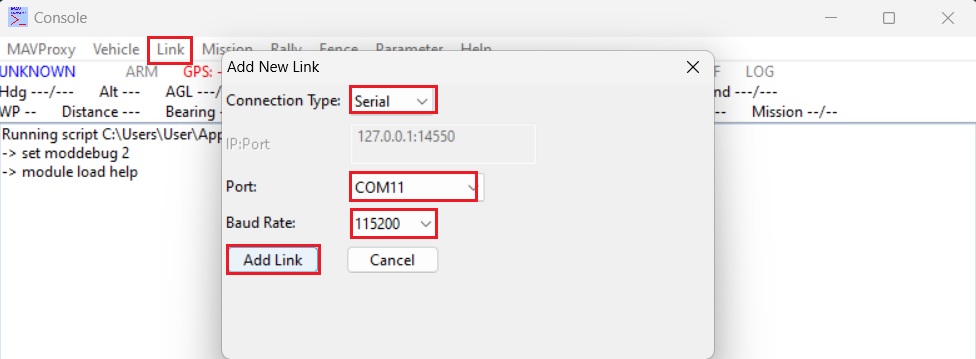
- Führen Sie MAVProxy aus.
Gehen Sie zu Link–>Hinzufügen–>Seriell–>Wählen Sie die Telemetrieverbindung oder den Autopiloten aus COM-Anschluss und einstellen Baud-Rate. Klicken Sie Link hinzufügen.
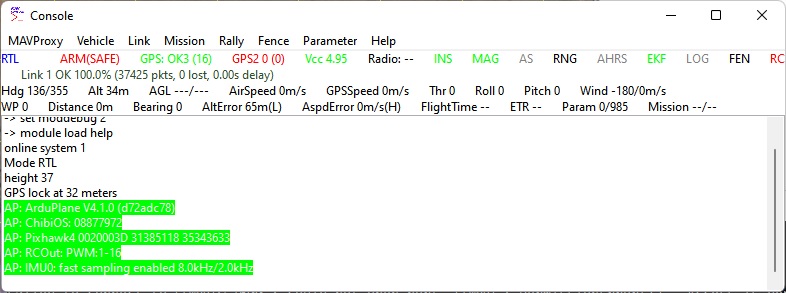
- Wenn die Verbindung in Ordnung ist, sollte Ihr MAVProxy-Bildschirm etwa so aussehen.

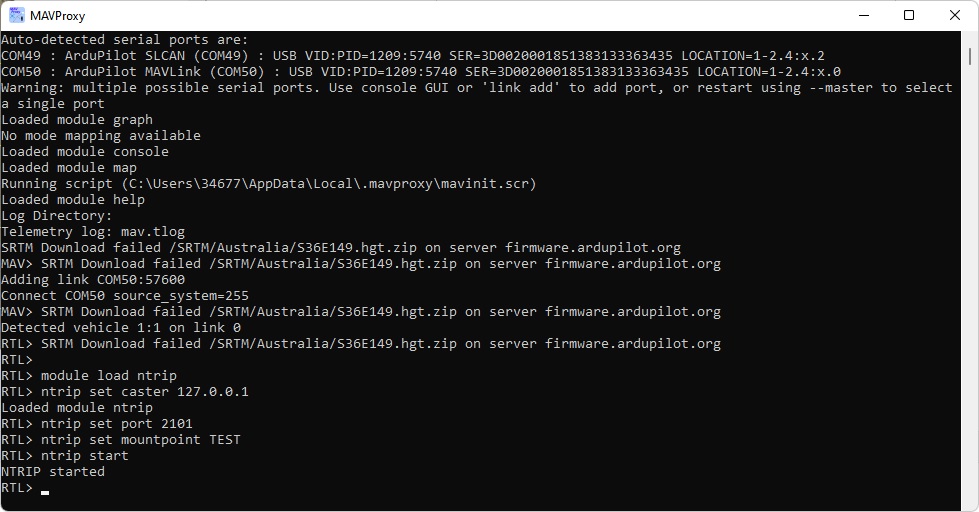
- Öffnen Sie das MAVProxy-Terminalfenster. Typ:
Modul laden ntrip
Ntrip-Set caster 127.0.0.1
ntrip setzt Port 2101
ntrip setze den Einhängepunkt TEST
ntrip starten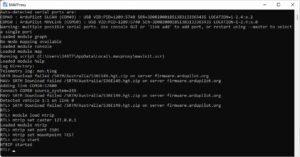
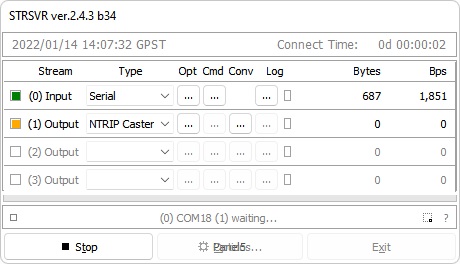
- Nachdem der vorherige Schritt abgeschlossen ist, sollte STRSVR ähnlich wie im folgenden Beispiel aussehen, was darauf hinweist, dass die Datenübertragung läuft.
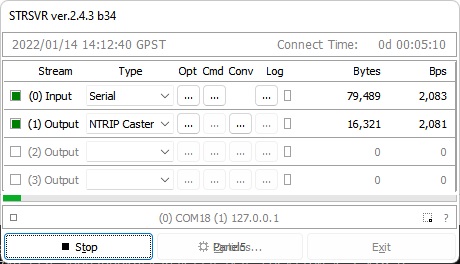
- Der mit Ihrem Autopilot verbundene GNSS-Empfänger empfängt automatisch RTCM-Nachrichten von Ihrer Basisstation und gibt diese ein RTK fix/float-Modus.