 und
und 
Wie verbinden simpleRTK2B2B Auf dem Weg zu ArduPilot mit externem RTK Korrekturen?

- 2022-05-02
Dieses Tutorial ist nützlich für Sie, wenn Sie das verwenden möchten simpleRTK2B2B Header-Kit mit externem RTK Korrekturen, die über MissionPlanner oder QGroundControl gesendet werden.

Erforderliche Hardware:
- simpleRTK2B2B-Überschrift – Basis-Starterkit
- USB-zu-Micro-USB-Kabel
- Pixhawk-Kabelsatz
- Holybro Pixhawk4 (Sie können Ihren bevorzugten Autopiloten verwenden)
- einen PC oder Laptop
Erforderliche Software:
- Mission Planner
- u-center ( für M8, M9, F9)
Wichtige Dinge vor dem Start:
- Dieses Tutorial basiert auf der simpleRTK2BÜberschrift 2B – Basic Starter Kit. Wenn Sie eine andere Hardware haben, müssen Sie möglicherweise einige Änderungen in diesem Tutorial vornehmen.
Wir haben vorbereitet noch ein Tutorial für die simpleRTK3B Heading. - Wir haben das Tutorial mit diesem Autopiloten validiert:
- Holybro Pixhawk4
- Wir haben das Tutorial mit dieser Firmware-Version validiert:
- ArduCopter 4.1.5
- Die Programmierer von ArduPilot haben restriktive Bedingungen eingeführt, damit Ihr Autopilot den GNSS-basierten Kurs verwenden kann. Hier einige davon:
- Sie brauchen gut RTK fix Daher ist es zwingend erforderlich, beide Antennen an einem guten Standort zu platzieren (im Freien, keine Bäume, keine hohen Gebäude in der Nähe).
Wenn Sie versuchen, dieses Tutorial in Ihrem Haus mit den Antennen in der Nähe Ihres Fensters zu befolgen, es wird nicht funktionieren. - Platzieren Sie beide Antennen mit Abstand voneinander (Abstand zwischen den Antennen sollte >30cm und <5m betragen).
Wenn Sie die Antennen nebeneinander platzieren, es wird nicht funktionieren.
Platzieren Sie die Antennen in der X-Achse Ihres rover (Vorwärtsrichtung). Sie können dies später ändern. - Platzieren Sie beide Antennen in einer Ebene parallel zu Ihrer Autopilot-Ebene (dh wenn Ihr Autopilot horizontal ausgerichtet ist, platzieren Sie beide Antennen auf gleicher Höhe über dem Boden).
Wenn die Antennen nicht auf der gleichen Höhe wie Ihr Flugzeug bzw.rover/copter müssen Sie andernfalls den Parameter GPS_POS1_Z setzen es wird nicht funktionieren
- Sie brauchen gut RTK fix Daher ist es zwingend erforderlich, beide Antennen an einem guten Standort zu platzieren (im Freien, keine Bäume, keine hohen Gebäude in der Nähe).
- Verbinden Sie die GNSS-Empfänger noch nicht mit dem Autopiloten, wir konfigurieren alles eigenständig und verbinden anschließend alles
So konfigurieren Sie Ihr simpleRTK2B2B-Header-Kit zum Anschluss an ArduPilot und zum Empfang externer Daten RTK Korrekturen?
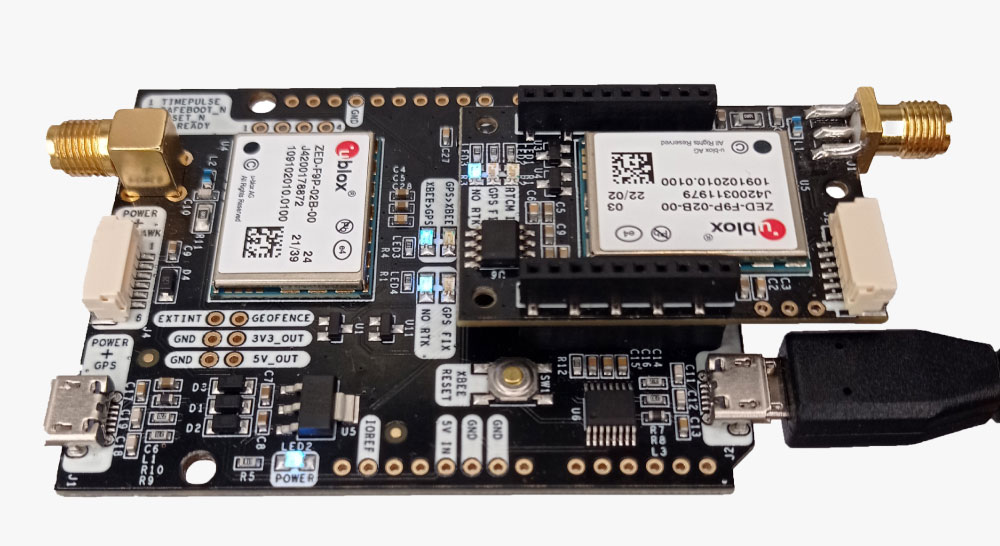
- simpleRTK2B2B (Big Board) fungiert als Basis in der Konfiguration mit beweglicher Basis
- simpleRTK2B2Blite (kleines Board) fungiert als rover in der beweglichen Basiskonfiguration
- Die Konfigurationsdatei funktioniert auf der Firmware 1.13 of ZED-F9P.
Konfigurieren Sie zunächst simpleRTK2B2B-Empfänger (auch bekannt als Big Board).
- Schließen Sie die simpleRTK2B2B über den mit gekennzeichneten USB-Anschluss an Ihren PC an POWER+GPS.
- Führen Sie u-center und verbinden Sie Ihren Receiver über den COM-Port.
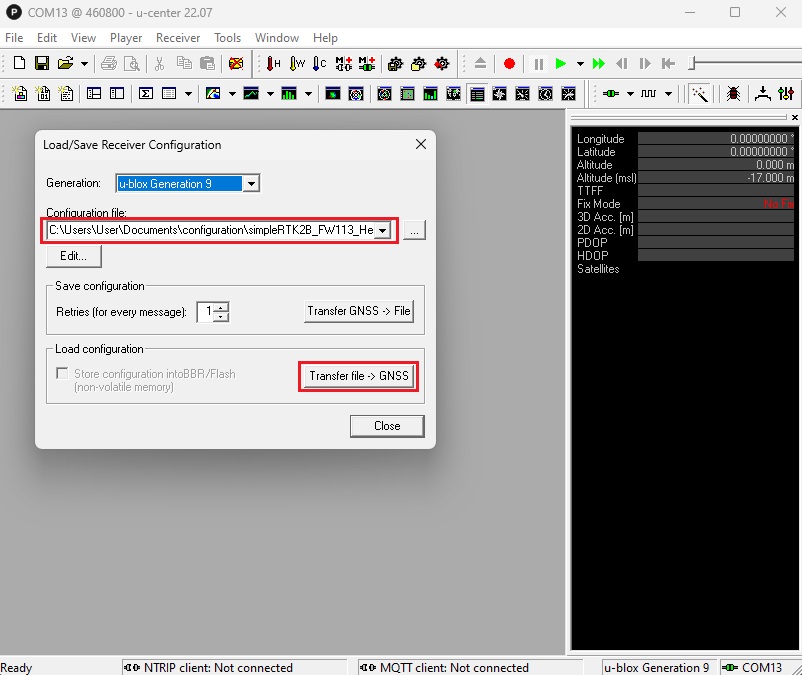
- Gehen Sie zu Extras –> Empfängerkonfiguration …. Konfigurationsdatei auswählen simpleRTK2B2B_FW113_HeadingKit_extcorrections_simpleRTK2B2B_5Hz-00.txt.
Klicken Sie auf Kostenlos erhalten und dann auf Installieren. Datei übertragen–>GNSS.
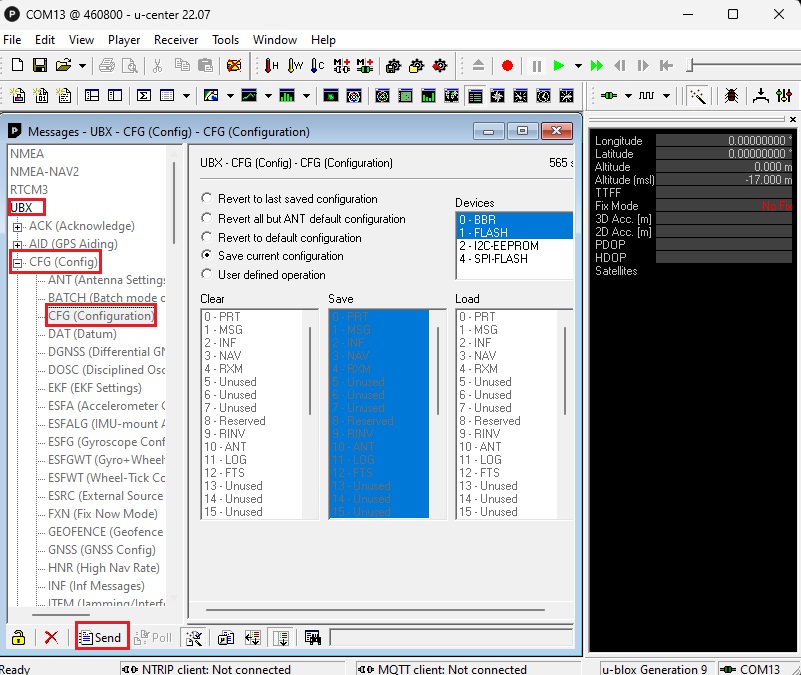
- Gehen Sie zu Ansicht–>Nachrichtenansicht–>UBX–>CFG–>CFG. Wählen Aktuelle Konfiguration speichern und klicken auf Senden.
Zweitens konfigurieren simpleRTK2B Lite Empfänger (auch bekannt als kleines Board).
- Stellen Sie sicher, dass die simpleRTK2B Lite Die Platine wird oben montiert simpleRTK2B2B-Platine.
- Verbinden Sie die Karte über den mit gekennzeichneten USB-Anschluss mit Ihrem PC POWER+XBEE. Über diesen USB-Anschluss können Sie mit dem kommunizieren simpleRTK2B Lite Board über seinen UART1.
- Führen Sie u-center und verbinden Sie Ihren Receiver über den COM-Port.
- Gehen Sie zu Extras –> Empfängerkonfiguration ….Konfigurationsdatei auswählen simpleRTK2B2B_FW113_HeadingKit_extcorrections_simpleRTK2B2Blite_5Hz-00.txt Klicken Sie auf Kostenlos erhalten und dann auf Installieren. Datei übertragen –> GNSS
Beachten Sie, dass Sie die Konfigurationsdatei je nach Ihrer vorherigen Konfiguration möglicherweise zweimal hochladen müssen, da in der Mitte der Konfigurationsdatei eine Baudratenänderung vorliegt.
- Gehen Sie zu Ansicht–>Nachrichtenansicht–>UBX–>CFG–>CFG. Auswählen Aktuelle Konfiguration speichern und klicken auf Senden.
Drittens laden Sie die ArduPilot-Konfigurationsdatei.
- Verbinden Sie Ihren Pixhawk über ein USB-auf-Micro-USB-Kabel mit Ihrem Computer.
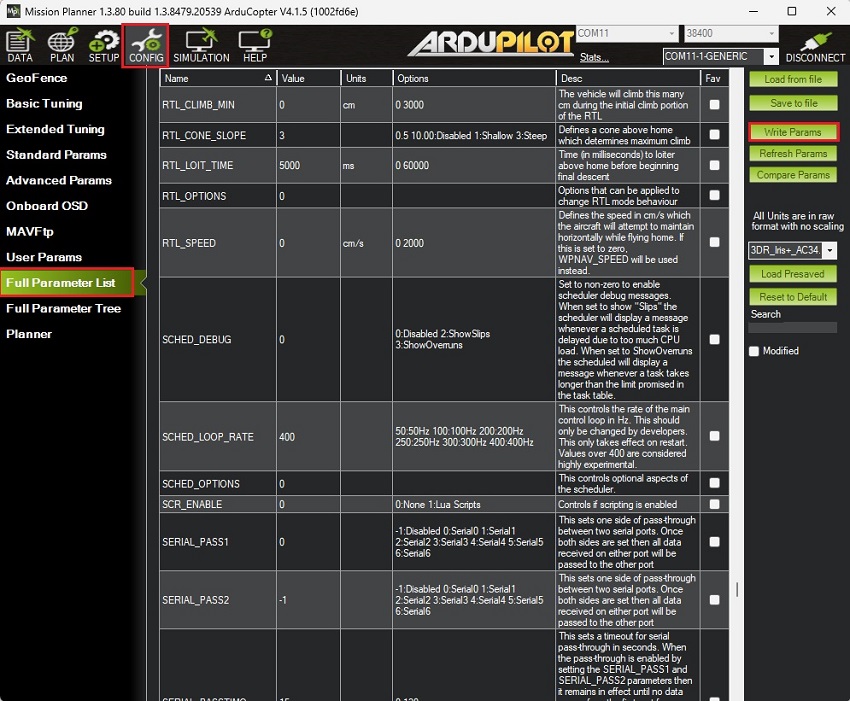
- Offen Mission Planner und schließen Sie Ihren Pixhawk über den COM-Port daran an.

- Gehen Sie zu CONFIG->Vollständige Parameterliste.
Da die Firmware-Versionen von Ihrer abweichen können, finden Sie unten eine Liste aller Parameter, die im Vergleich zur Standardkonfiguration geändert wurden:COMPASS_ENABLE,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,0
EK3_MAG_CAL,5
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
GPS_POS1_X,-1.25 *Dieser Wert muss den Abstand in Metern zwischen den Antennen enthalten. Ändern Sie das Vorzeichen, wenn der Kurs um 180 Grad versetzt ist (oder tauschen Sie die SMA-Anschlüsse aus simpleRTK2B2B+Überschrift).
GPS_PRIMARY,1
GPS_RATE_MS, 200
GPS_RATE_MS2, 200
GPS_TYPE,17
GPS_TYPE2,18
SERIAL1_BAUD,460
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,5
SERIAL2_BAUD,460
SERIAL2_OPTIONS,0
SERIAL2_PROTOCOL,5Öffentlichkeitsarbeit/Presse Schreiben Sie Parameter um deine Einstellung zu speichern.
- Stellen Sie nach dem Speichern aller Parameter sicher, dass Sie Ihren Autopiloten von der Stromversorgung trennen, indem Sie das USB-Kabel abziehen, um Ihren Autopiloten zurückzusetzen.
Schließen Sie abschließend das Steuerkurs-Kit an Ihren Autopiloten an.
- Stellen Sie sicher, dass Sie die Ersteinrichtung Ihres Autopiloten bereits abgeschlossen haben. Sie können das überprüfen Benutzerhandbuch von ArduPilot, um zu sehen, wie es geht.
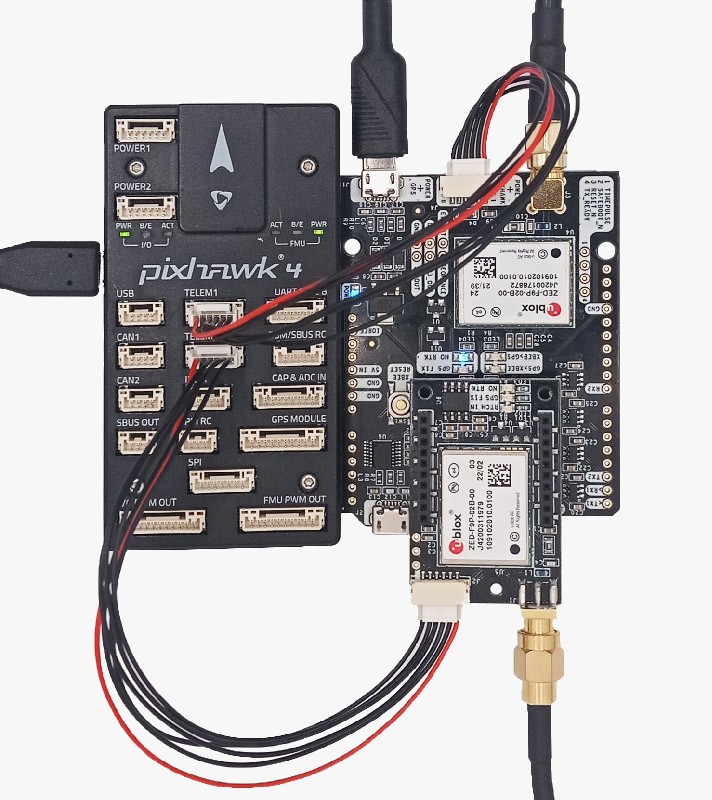
- Verwenden Sie den JST-Anschluss am simpleRTK2B2B (große Platine) und verbinden Sie es mit dem TELEM1-Port.
Verwenden Sie den JST-Anschluss am simpleRTK2B Lite (kleine Platine) und verbinden Sie es mit dem TELEM2-Port.
Verbinden Sie Ihr Big Board über den mit gekennzeichneten USB-Anschluss mit dem PC POWER+GPS. - Verbinden Sie die Antennen mit Ihrem Receiver. Stellen Sie sicher, dass sich Ihre Antennen vollständig im Freien befinden und die eingangs erwähnten Anforderungen von ArduPilot erfüllen.
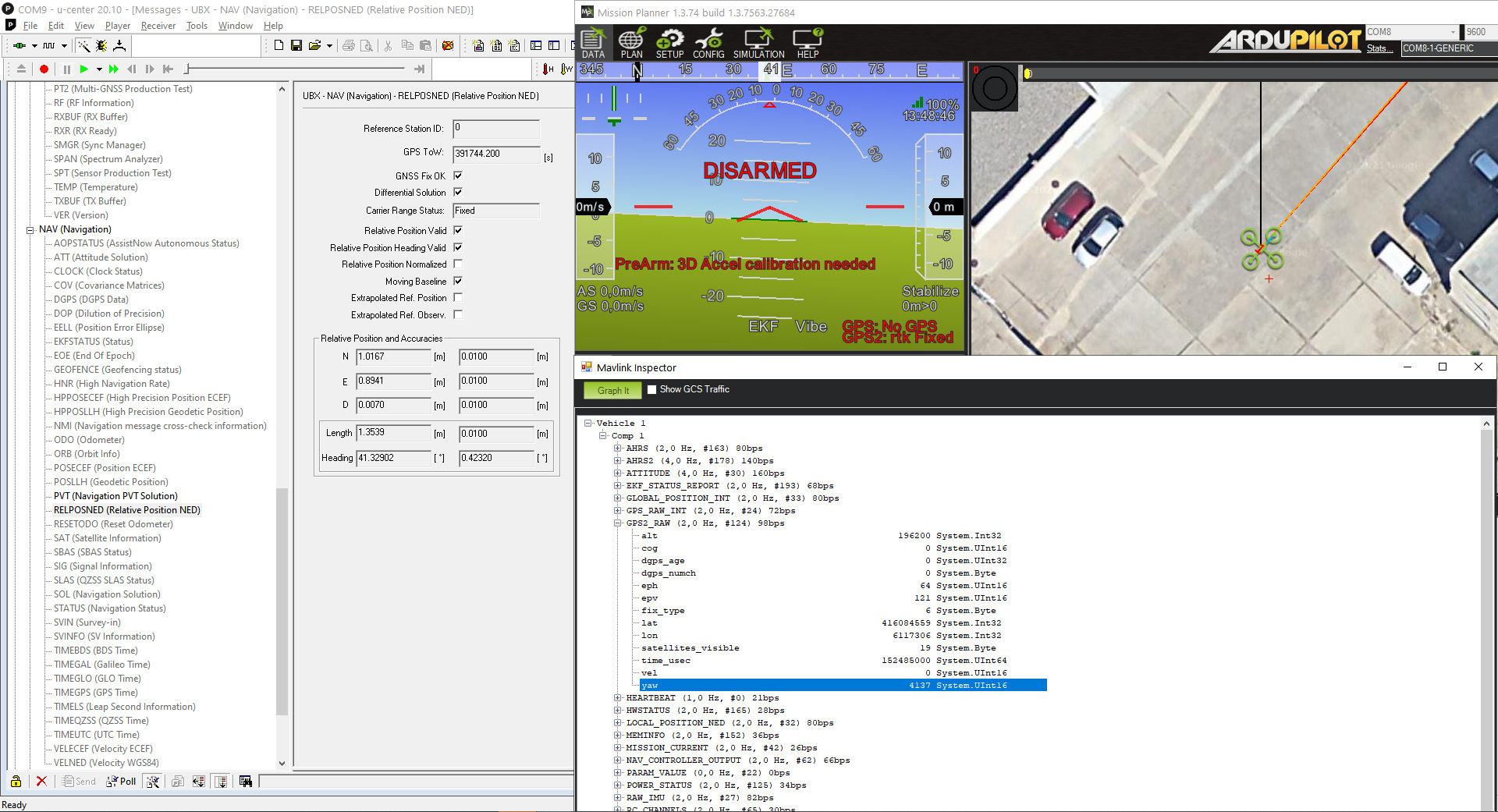
- Schalten Sie den Autopiloten ein und warten Sie einige Sekunden. Überprüfen Sie den AHRS-Kurswert Mission Planner, es sollte mit der Richtung zwischen Ihren Antennen übereinstimmen.
Sie können den Kurswert Ihrer Antennen auch mit überprüfen u-center folgend Ansicht–>Nachrichtenansicht–>UBX–>NAV–>RELPOSNED in der Software.
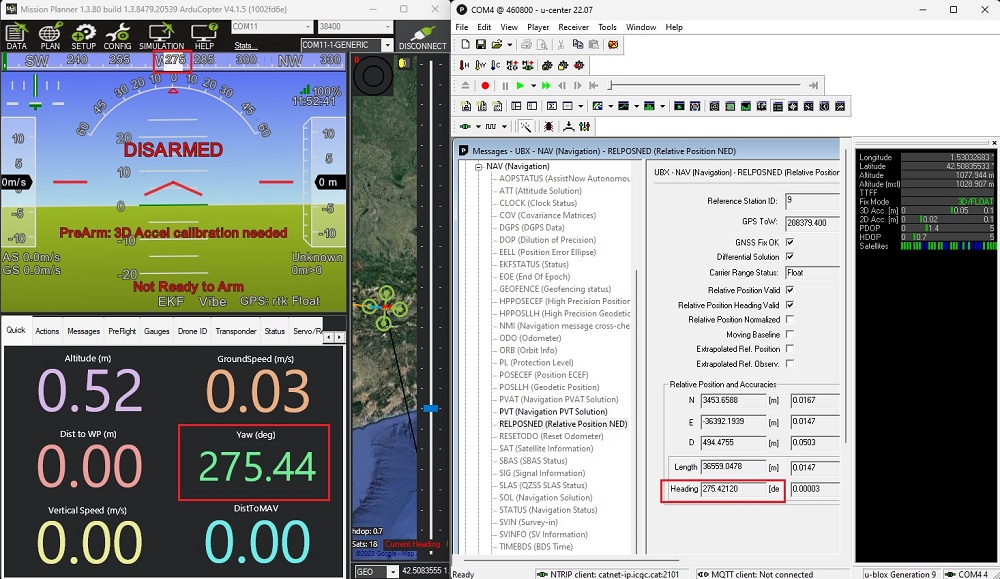
- Stellen Sie für eine zusätzliche Überprüfung sicher, dass der Überschriftenwert im AHRS mit dem in übereinstimmt STRG+F–>MAVlink-Inspektor–>GPS2_RAW–>Gieren.
- Jetzt können Sie senden RTK Korrekturen von Ihrer Bodenkontrollstation an Ihren Autopiloten, diese Tutorials können Ihnen helfen:
Denken Sie auch hier daran, dass die GNSS-basierte Gierbewegung möglicherweise nicht ordnungsgemäß funktioniert, wenn:
- Fixtyp ist nicht RTK fix
- Der Antennenabstand liegt nicht innerhalb von 20 % des GPS1_POS_X-Parameters
- Die Autopilot-Einstellung stimmt nicht mit dem Höhenunterschied der Antenne überein
