und
und 



Mission Planner
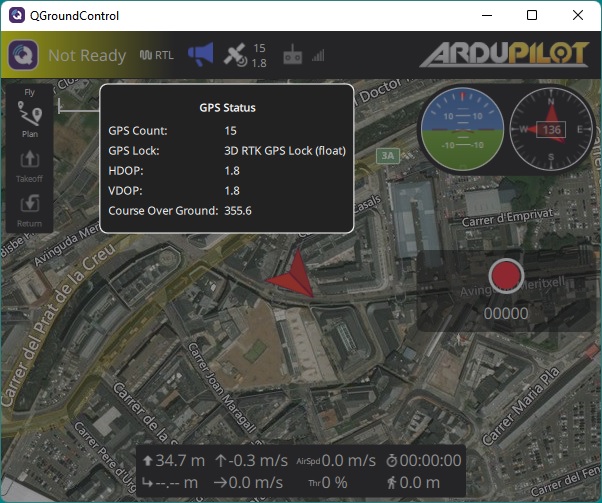
QGroundControl
Mission Planner
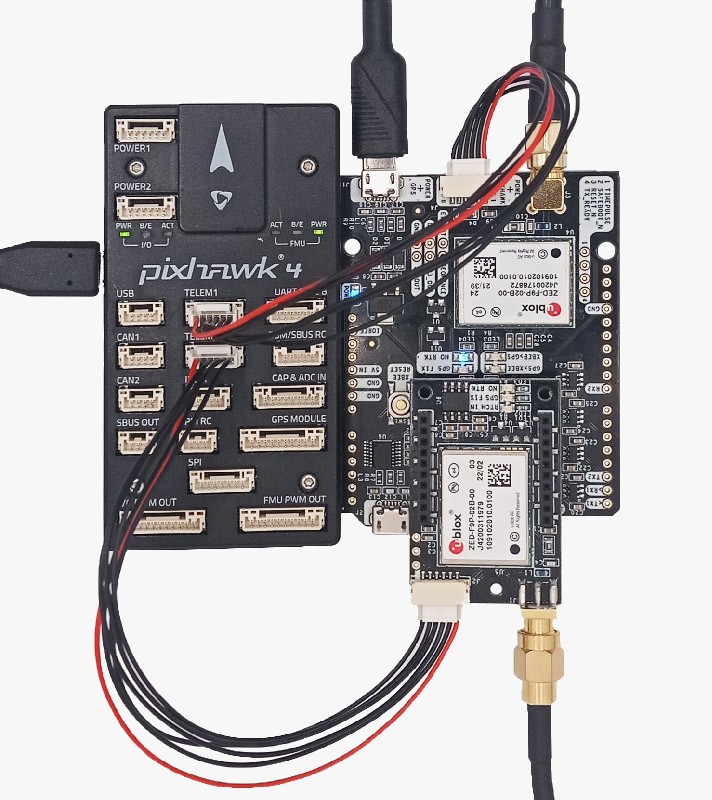
- Öffnen Sie MissionPlanner. Verbinden Sie Ihren AutoPilot über den COM-Port.
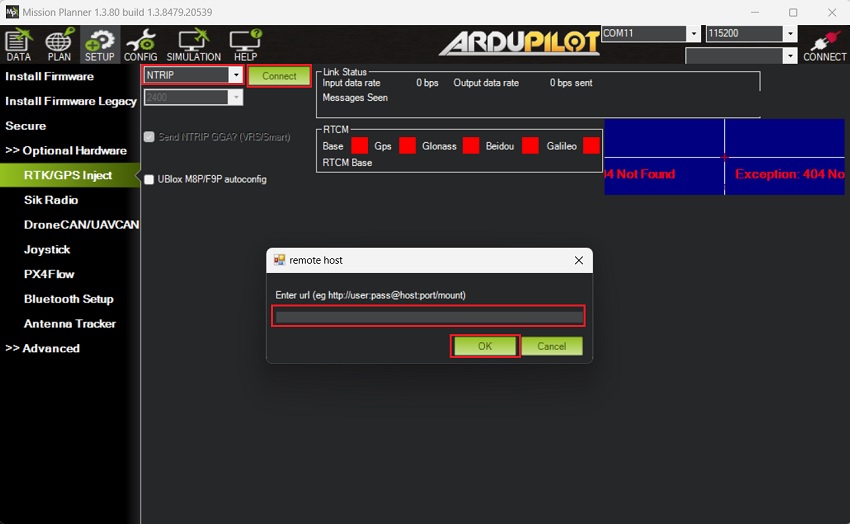
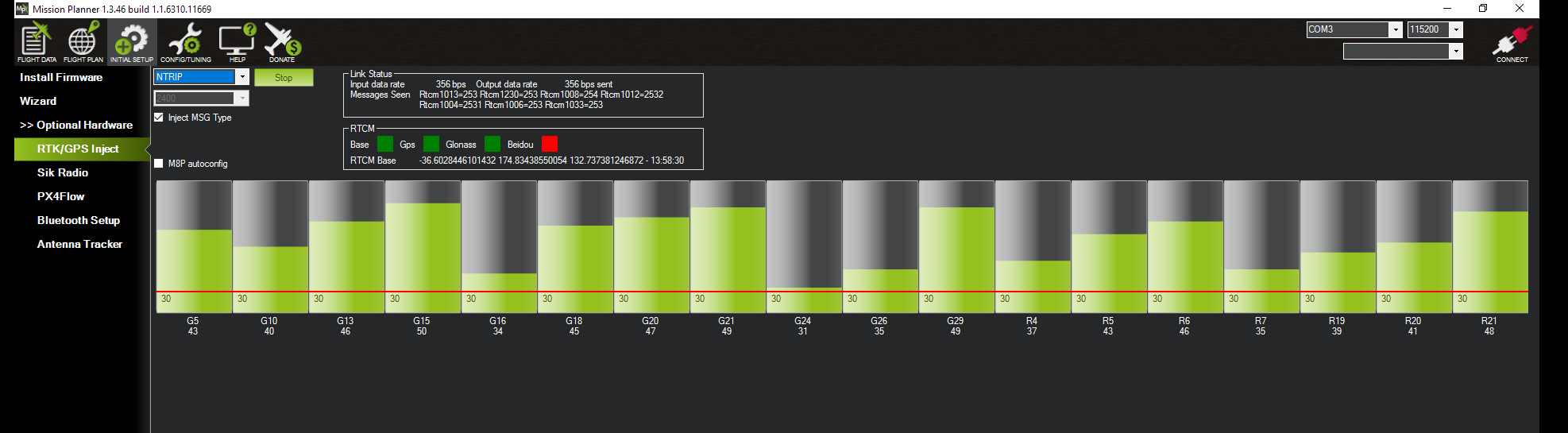
- Gehen Sie zu SETUP–>Optionale Hardware–>RTK/GPS-Inject.
- Auswählen NTRIP aus dem Dropdown-Feld und drücken Sie Vernetz Dich. Es erscheint ein Popup-Fenster. Geben Sie Ihren NTRIP ein caster Anmeldeinformationen in diesem Format: user:pass@host:port/mountpoint.

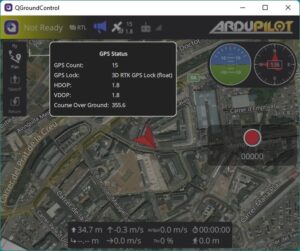
- Wenn alles korrekt ist, sehen Sie auf der Karte eine Zusammenfassung des GPS-Signalstatus und der generierten RTCM-Nachrichten sowie die Position Ihrer GNSS-Basisstation.
- Ihr mit dem Autopiloten verbundener GNSS-Empfänger empfängt RTCM-Korrekturen und geht in den Fest/Float-Modus über RTK Modus arbeiten können.
QGroundControl
- Öffnen Sie QGroundControl. Führen Sie MAVProxy aus.
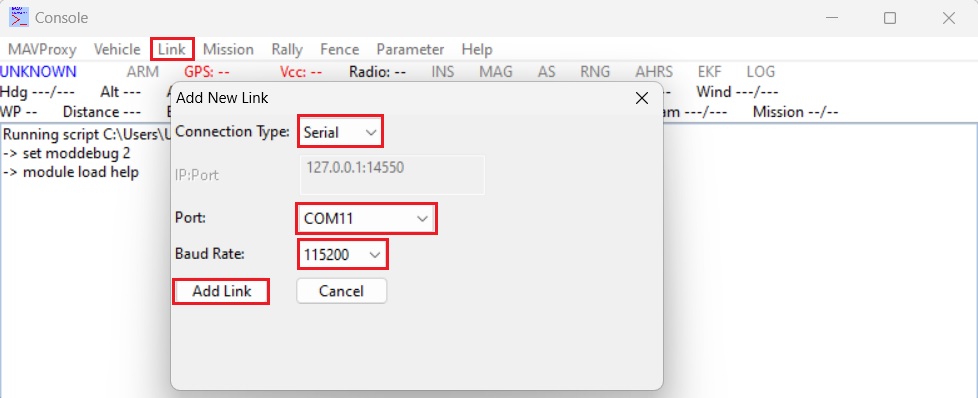
- Gehen Sie in MAVProxy zu Link–>Hinzufügen–>Seriell–>Wählen Sie die Telemetrieverbindung oder den COM-Port und die Baudrate des Autopiloten aus (normalerweise beträgt die Datenrate der USB-Verbindung 115200 und die radio Die Verbindungsrate beträgt 57600). Drücken Sie Link hinzufügen.

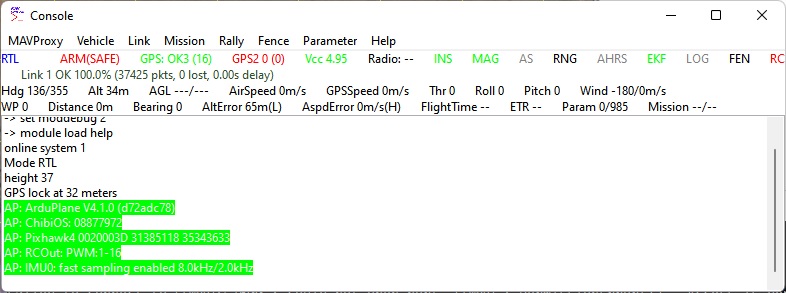
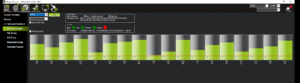
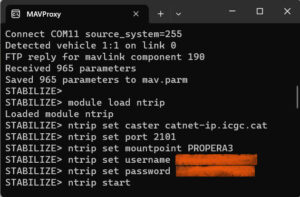
- Wenn die Verbindung in Ordnung ist, sollte Ihr MAVProxy-Bildschirm etwa so aussehen:

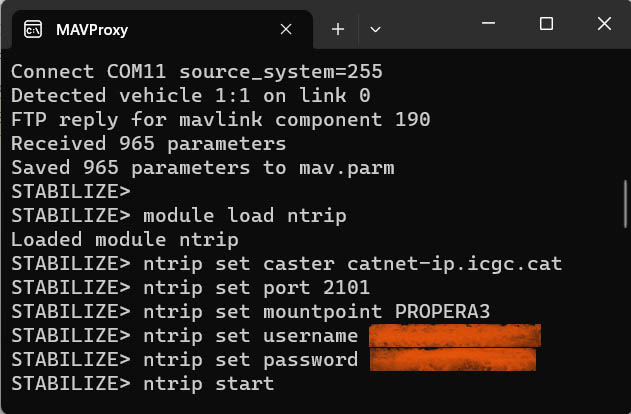
- Geben Sie im MAVProxy-Terminalfenster den Typ ein (ersetzen Sie XXXXX durch Ihren NTRIP caster Referenzen):
Modul laden ntrip
Ntrip-Set caster XXXXX
Ntrip-Set-Port XXXXX
ntrip setzt den Mountpoint XXXXX
ntrip legt den Benutzernamen fest XXXXX
ntrip Passwort festlegen XXXXX
ntrip starten
- Wenn der GNSS-Empfänger mit Ihrem Autopiloten verbunden ist, empfängt er automatisch RTCM-Nachrichten von Ihrem NTRIP caster und Übergang in RTK fix/float-Modus.