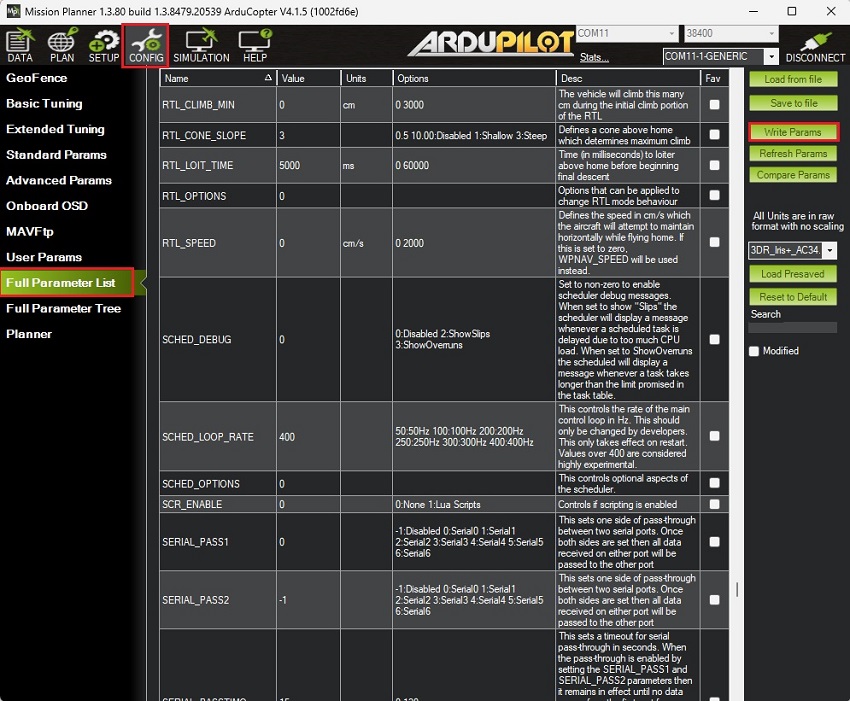
Gehen Sie zu KONFIG–>Vollständige Parameterliste.
Da sich die Firmware-Versionen möglicherweise von Ihren unterscheiden, finden Sie hier eine Liste aller Parameter, die im Vergleich zur Standardkonfiguration geändert wurden:
COMPASS_ENABLE,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,0
EK3_MAG_CAL,5
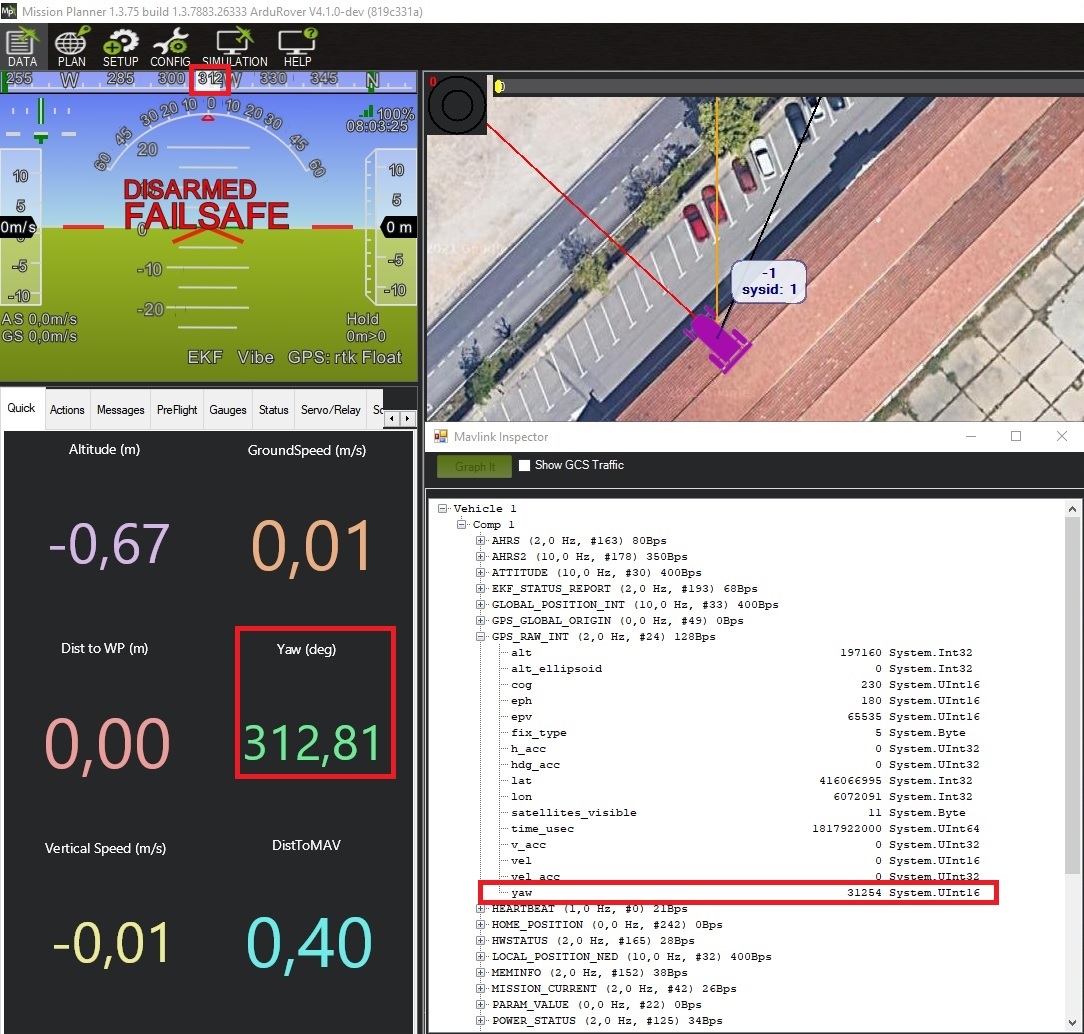
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
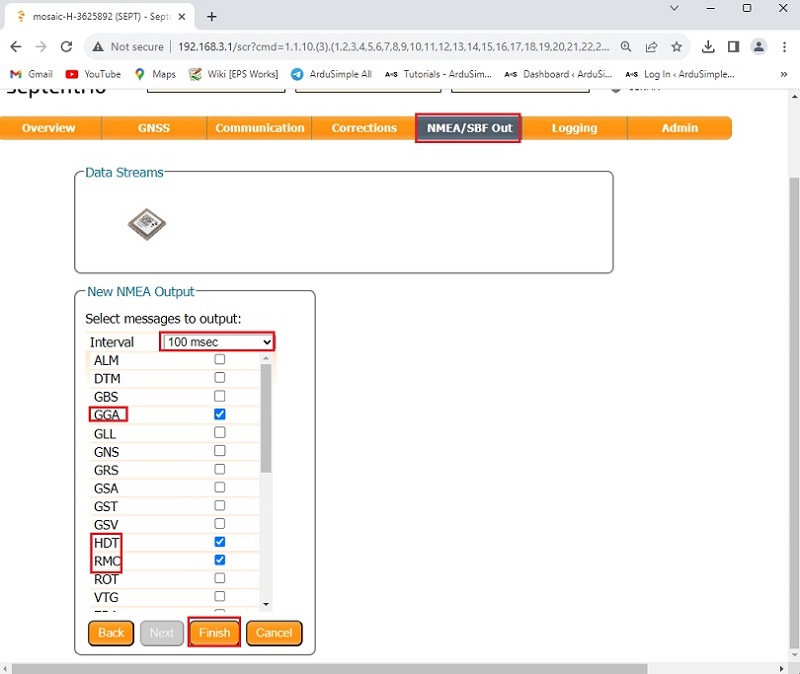
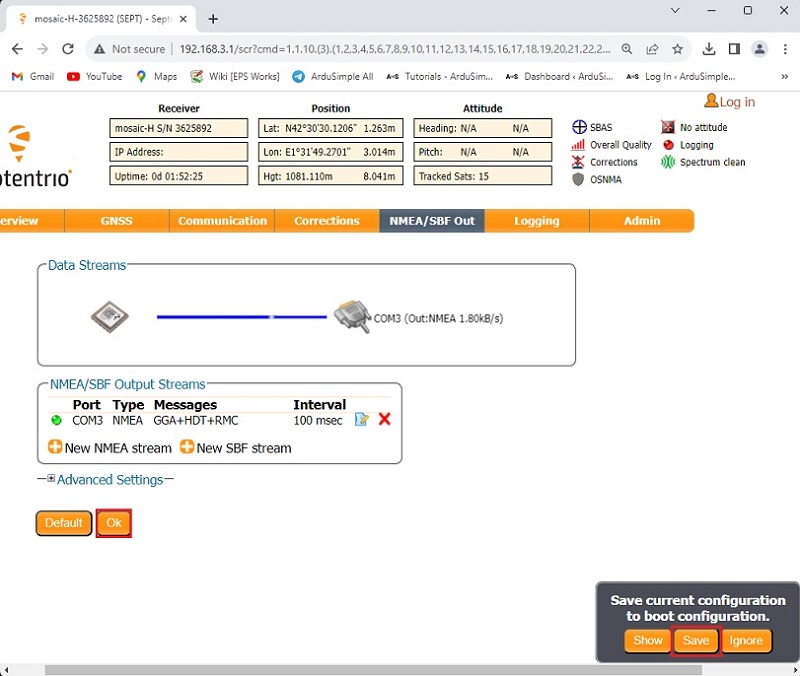
GPS_RATE_MS, 100
GPS_TYPE,16
SERIAL1_BAUD,115
SERIAL1_PROTOCOL,5
Öffentlichkeitsarbeit/Presse Schreiben Sie Parameter um deine Einstellung zu speichern.
 und
und  Jetzt shoppen
Jetzt shoppen