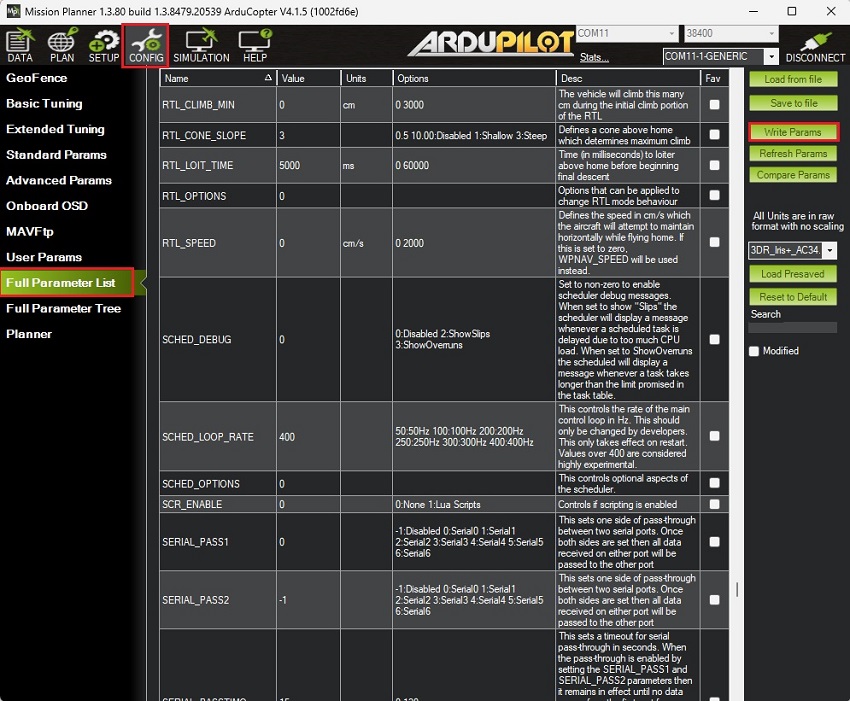
- Gehen Sie zu CONFIG->Vollständige Parameterliste.
Da die Firmware-Versionen von Ihrer abweichen können, finden Sie unten eine Liste aller Parameter, die im Vergleich zur Standardkonfiguration geändert wurden:
COMPASS_ENABLE,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,0
EK3_MAG_CAL,5
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
GPS_POS1_X,-1.25 *Dieser Wert muss den Abstand in Metern zwischen den Antennen enthalten. Ändern Sie das Vorzeichen, wenn der Kurs um 180 Grad versetzt ist (oder tauschen Sie die SMA-Anschlüsse aus simpleRTK2B2B+Überschrift).
GPS_PRIMARY,1
GPS_RATE_MS, 100
GPS_RATE_MS2, 100
GPS_TYPE,0
GPS_TYPE2,18
SERIAL1_BAUD,115
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,5
Öffentlichkeitsarbeit/Presse Schreiben Sie Parameter um deine Einstellung zu speichern.
 und
und  Jetzt shoppen
Jetzt shoppen