So führen Sie eine kinematische Nachbearbeitung durch (PPK) mit kostenloser Software RTKLIB
2024-02-08
Nachbearbeitete Kinematik (PPK) ist eine Positionierungstechnik, bei der GNSS-Daten nach Abschluss der Datenerfassung nachbearbeitet werden.
PPK Lösungen haben mehrere Vorteile:
Keine Korrekturen in Echtzeit erforderlich:
Das rover Die Hardware ist einfacher, kostengünstiger, leichter und verbraucht weniger Strom, da für die Nachbearbeitung keine Echtzeit-Datenverbindung zwischen Basis und erforderlich ist rover.Dies kann in abgelegenen oder anspruchsvollen Umgebungen von Vorteil sein, in denen Echtzeitkorrekturen möglicherweise begrenzt oder nicht verfügbar sind. RTK hat eine begrenzte Reichweite von typischerweise 5-10 km PPK hat keine solche Bereichsbeschränkung.
Konsistente und wiederholbare Ergebnisse:
PPK liefert konsistente und wiederholbare Ergebnisse. Sobald die Daten erfasst sind, können sie mithilfe verschiedener Algorithmen oder Parameter mehrfach verarbeitet werden, um die Genauigkeit der endgültigen Positionslösung zu optimieren.
Im vorherigen Tutorial haben wir es Ihnen gezeigt wie man RINEX-Dateien daraus generiert simpleRTK2B2B und simpleRTK3B. In diesem Tutorial zeigen wir, wie Sie die RINEX-Dateien aus Ihrer Basis verwenden und rover für PPK.
Wenn Sie keine eigene Basisstation haben, machen Sie sich keine Sorgen. Sie können die RINEX-Datei von einer Online-Basisstation in Ihrer Nähe herunterladen.
Den kostenlosen Korrekturdienst finden Sie in Ihrer Nähe hier.
So führen Sie eine kinematische Nachbearbeitung durch (PPK) mit RTKLIB?
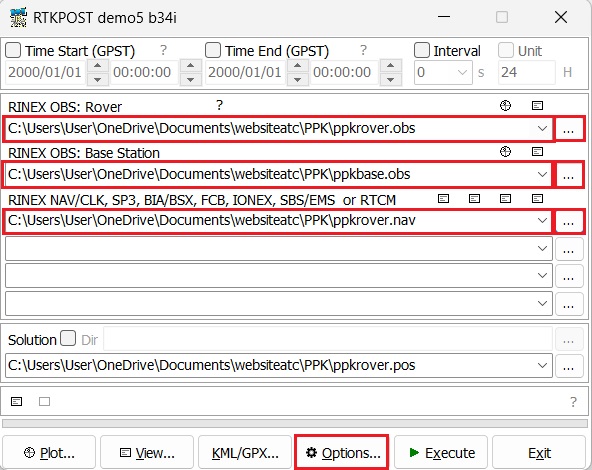
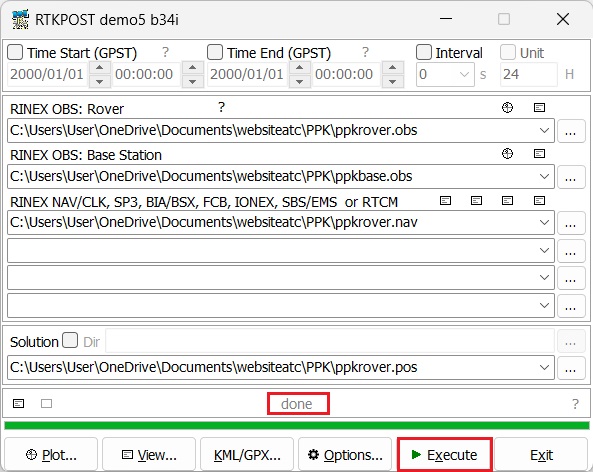
Offen RTKPOST von Ihrem heruntergeladenen RTKLIB-Paket. Drücke den ... Wählen Sie mit den Schaltflächen auf der rechten Seite die aus Rover Beobachtungsdatei, die Basisbeobachtungsdatei und die Navigationsdatei. Drücke den Optionen… . Wenn Sie keine eigene Basisstation haben, können Sie eine RINEX-Datei vom Online-Korrekturdienst herunterladen hier.
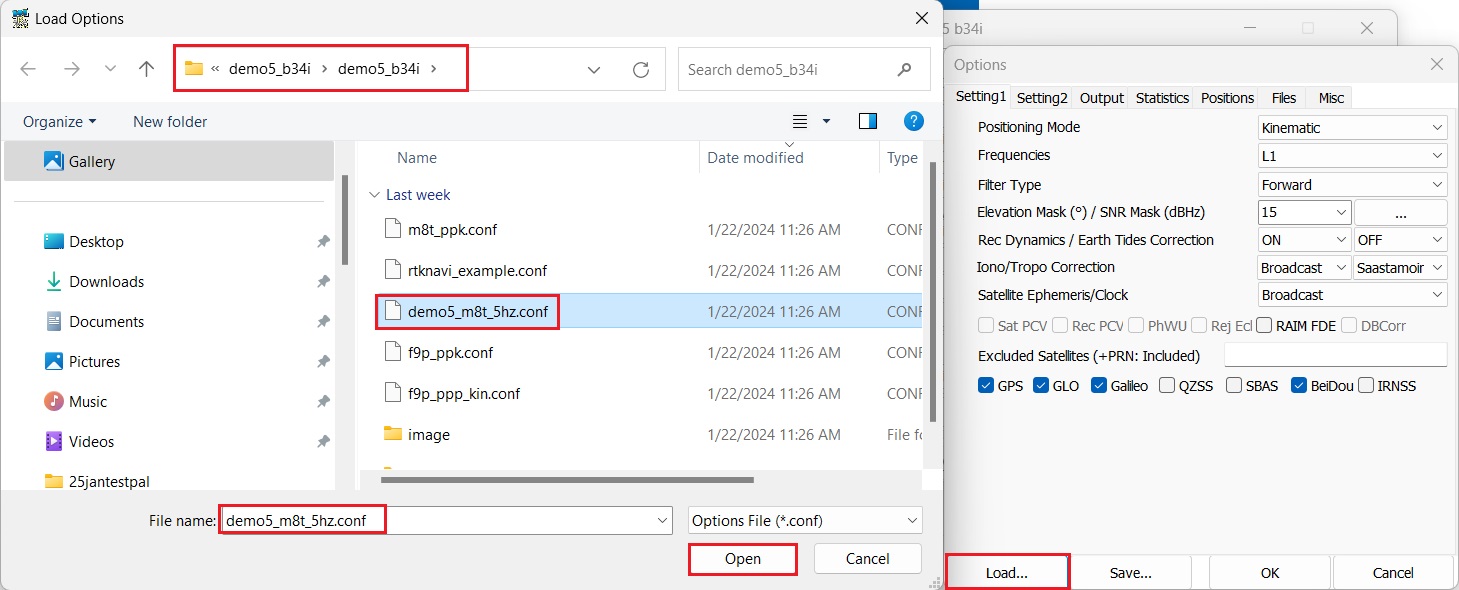
Klicken Sie auf die Laden Sie .
Wähle aus demo5_m8t_5hz.conf Datei aus demselben Ordner wie demo5 RTKAusführbare LIB-Dateien, und klicken Sie dann auf Offen.
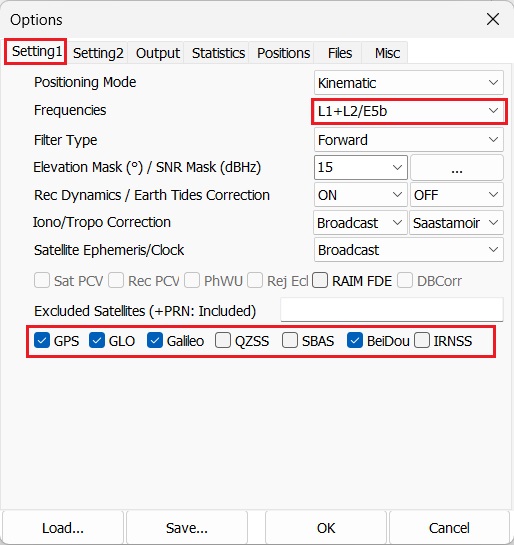
At Einstellung1 Tab, wählen Sie L1+L2/E5b at Frequenzen. Aktivieren Sie die entsprechenden Satelliten in Ihrer geografischen Region.
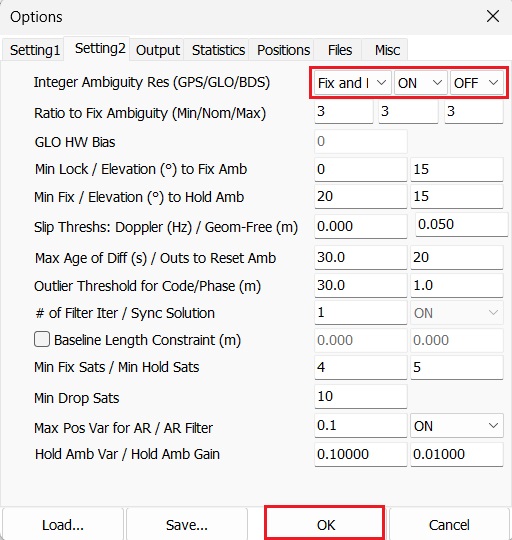
Legen Sie auf der Registerkarte „Einstellung2“ fest Ganzzahlige MehrdeutigkeitsresGPS- Ortung zu Fixieren und Halten, GLO zu ON, BDS zu OFF.
Wenn Sie kein F9P Empfänger für die Basis, dann lassen Sie dieses Feld auf „Fix-and-Hold“ eingestellt, wodurch die Vorspannungen automatisch kalibriert werden. Klicken OK um das Optionsmenü zu schließen.
Klicken Sie auf Kostenlos erhalten und dann auf Installieren. Ausführen um die Lösung auszuführen. Die Leiste am unteren Rand der GUI zeigt den Lösungsstatus während der Ausführung an und meldet etwaige Fehler. Während die Lösung ausgeführt wird, sollte eine Mischung aus Q=1 und Q=2 angezeigt werden. Du wirst sehen erledigt wenn es fertig ist.
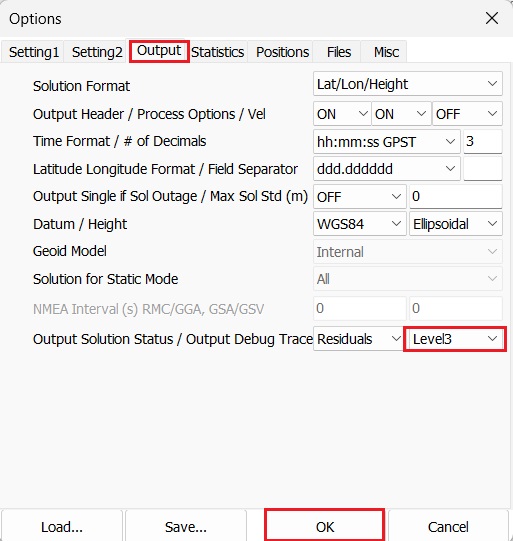
Wenn Sie nur Q=0 sehen, stimmt etwas nicht. Öffnen Sie in diesem Fall die Optionen Fenster wählen Sie die Output Klicken Sie auf die Registerkarte „Output Debug Trace“ und setzen Sie „Output Debug Trace“ auf „Level3“, verlassen Sie das Menü „Optionen“ und führen Sie die Lösung erneut aus. Dann öffnen Sie das **.verfolgen Weitere Informationen dazu, was schief gelaufen ist, finden Sie in der Datei im Lösungsordner.
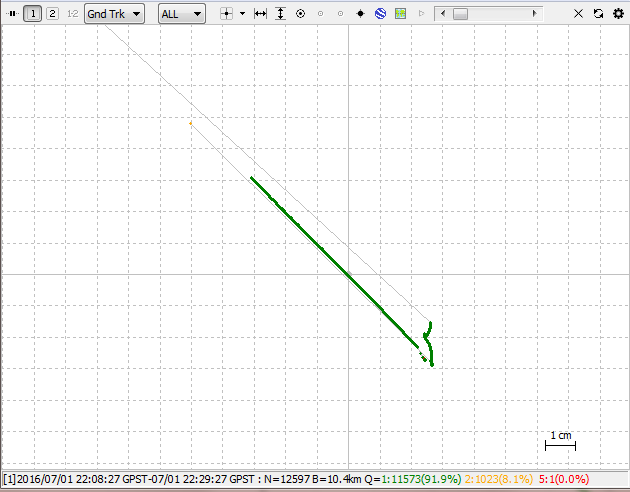
Klicken Sie auf Grundfläche um die Lösung zu zeichnen RTKHANDLUNG.
Q = 1 Lösung bedeutet Fix: Die Genauigkeit liegt im Zentimeterbereich.
Q = 2 bedeutet Float: Die Genauigkeit liegt im Submeterbereich
Q = 5 Lösung steht für Single, was normalerweise auf Meterebene steht
Jetzt können Sie auftreten PPK für Ihr Projekt! Mit dieser Methode können Sie eine hochpräzise GNSS-Positionierung erreichen, ohne dass Korrekturen in Echtzeit erforderlich sind, wodurch die Hardwareanforderungen vereinfacht werden.
Wenn Sie die benötigen RTK Starter-Kit, bestehend aus beidem Rover und Basis für PPKWir haben alle benötigten Produkte auf Lager und sind versandbereit:
Wenn Ihnen dieser Inhalt gefallen hat, können Sie uns weiter folgen Twitter, YouTube, Facebook or LinkedIn um über solche Inhalte auf dem Laufenden zu bleiben.
Hast du Fragen oder Wünsche? Kontaktiere uns! Wir antworten <24 Stunden!
1. Unser Engineering-Team wird sich mit Ihnen in Verbindung setzen, um alle Fragen zu klären
2. Wir halten Sie über Werbeaktionen und neue Produktveröffentlichungen auf dem Laufenden
3. Sie hören nur von uns, wenn wir wichtige Neuigkeiten haben, wir spammen Ihre E-Mail nicht zu
 und
und  Jetzt shoppen
Jetzt shoppen