machen
machen 
Einführung:
Das ZED-F9R-Modul kombiniert verschiedene Sensordaten um eine hochgenaue Positionierung zu ermöglichen, wo GNSS allein versagen würde:
- GNSS-Messungen
- IMU Daten (Beschleunigungsmesser+Gyroskop)
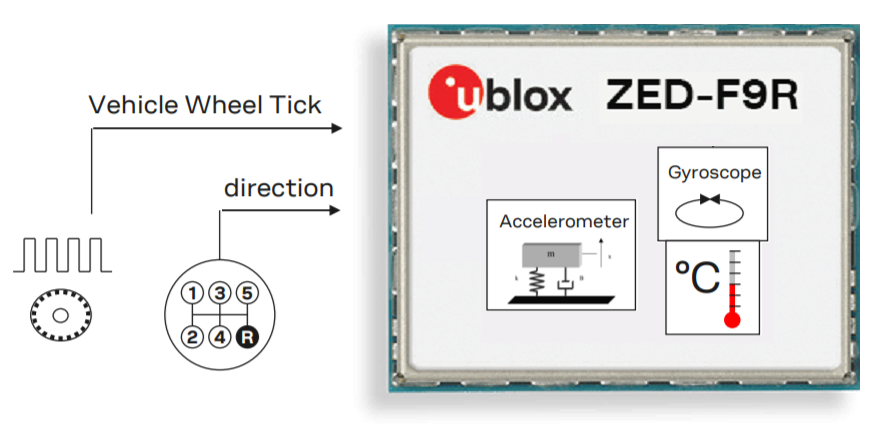
- (Optional) Fahrzeugradsensor oder Geschwindigkeitsinformation per Software
- Ein dediziertes dynamisches Modell
Aber das Erstaunliche an der F9R ist, dass sie überall eine zentimetergenaue Genauigkeit gewährleistet ZED-F9P Nicht möglich: Fahren unter Bäumen, neben hohen Gebäuden oder sogar in Tunneln!
Mal sehen, wie wir das damit versuchen können simpleRTK2B Fusion.

Fixtypen und Nutzungsmodi:
Zusätzlich zum traditionellen 2D, 3D, FLOAT RTK, FIX RTK, der ZED-F9R verfügt über 2 zusätzliche Fixtypen:
- DR+GNSS oder „Fusion-Modus“. Der Modus, in dem wir sein wollen: sowohl GNSS als auch IMU werden zusammen verwendet.
- DR oder „Dead Reckoning-Modus“. Das Modul hat lost GNSS-Signale und verlässt sich ausschließlich auf die IMU. Mit jeder zusätzlichen Sekunde wird die Position bei diesem Fixtyp immer schlimmer.
ZED-F9R verfügt über viele neue Konfigurationsparameter, die die Einrichtung erschweren können. Aus diesem Grund werden wir in dieser Anschlussanleitung 2 verschiedene Installationsarten und 2 verschiedene erläutern Nutzungsmodi:
- Basismodus: Sie erreichen keine Datenblattwerte, sondern mit minimuMit meiner Anstrengung werden Sie bereits eine unglaubliche Leistung sehen. Sie benötigen lediglich diese Anschlussanleitung.
- Erweiterter Modus: Sehen Sie sich die Datenblattwerte in Ihren Tests an. Sie müssen einige Seiten des u-blox-Integrationshandbuchs lesen. Wir verwenden die Pins „Wheel Tick“ und „Direction“ des Moduls.
Installation:
simpleRTK2B Fusion muss am Fahrzeug befestigt werden, eine Verwendung am Kabel ist nicht möglich. Das liegt daran, dass wir das brauchen IMU Daten müssen konsistent sein.
Es gibt Optionen, um den ZED-F9R in einer anderen Ausrichtung zu montieren, aber dies erfordert eine zusätzliche Kalibrierung. Aus diesem Grund empfehlen wir, den ZED-F9R einfach in der Standardrichtung zu montieren.
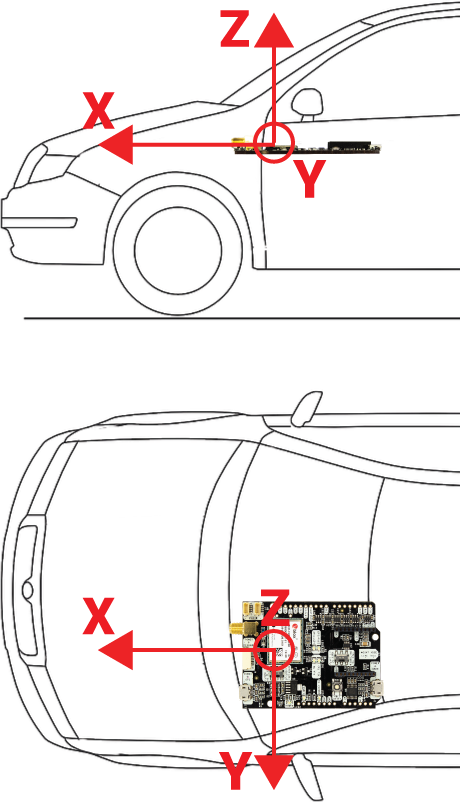
Wenn Sie den ZED-F9R in einer anderen Ausrichtung montieren möchten, ist dies auch möglich, aber aufwändiger. Sie können sich die Abschnitte ansehen IMU-Montageausrichtung und automatisch IMU-Montageausrichtung im Integrationshandbuch.
Um das Beste aus F9R herauszuholen, ist es am einfachsten, das zu platzieren RTK Platine und GNSS-Antenne möglichst nahe beieinander aufstellen.
Grundlegender Verwendungsmodus:
Die grundlegende Verwendung von F9R besteht nur in der Fusion von GNSS-Daten und IMU Daten, verwendet jedoch keine Geschwindigkeitsinformationen vom Fahrzeug. Dieser Modus erfordert nicht die Verwendung der WT- oder DIR-Pins und erfordert auch keine Geschwindigkeitsübertragung an den F9R. Die Leistung wird etwas schlechter sein als im F9R-Datenblatt, aber für viele Anwendungsfälle gut genug.
Stellen Sie sicher, dass sowohl die GNSS-Antenne als auch simpleRTK2B2B werden am Fahrzeug befestigt und versorgen den Empfänger mit Strom.
Wählen Sie unter CFG-NAVSPG-DYNMODEL das richtige „Dynamic Model“ aus:
- Automotive
- Mähroboter
- E-Scooter
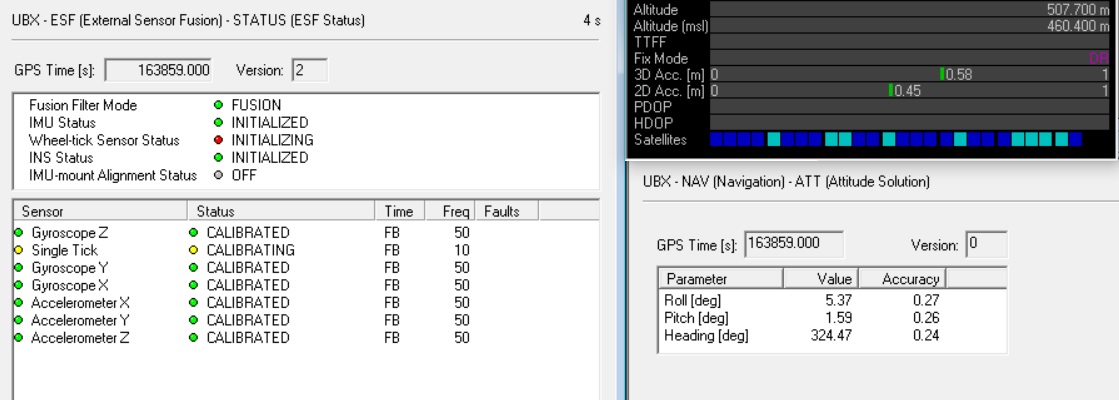
Aktivieren Sie die folgenden Meldungen, die nützliche Informationen zu Folgendem liefern:
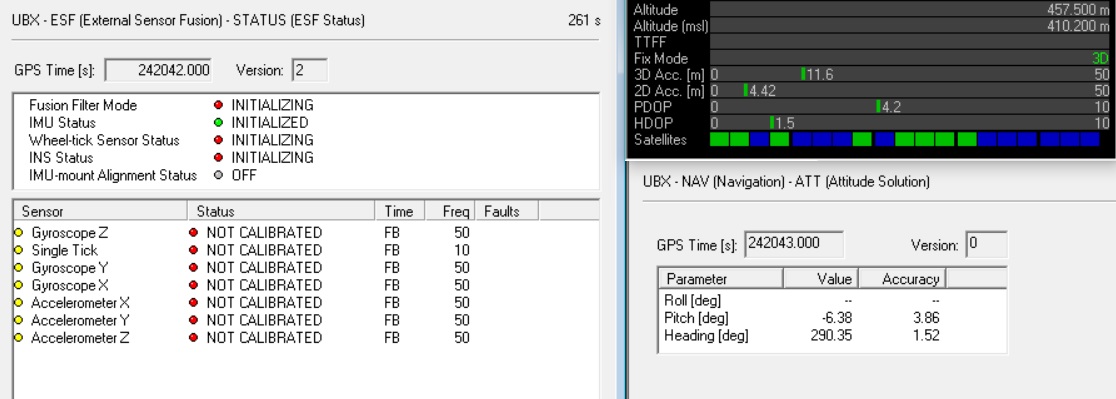
- UBX-ESF-STATUS: IMU Im Kalibrierungsstatus möchten wir, dass alles grün ist.
- UBX-NAV-ATT: die Lage des Fahrzeugs: Rollen, Nicken, Gieren.
- UBX-NAV-PVT: Typ und Position fixieren.
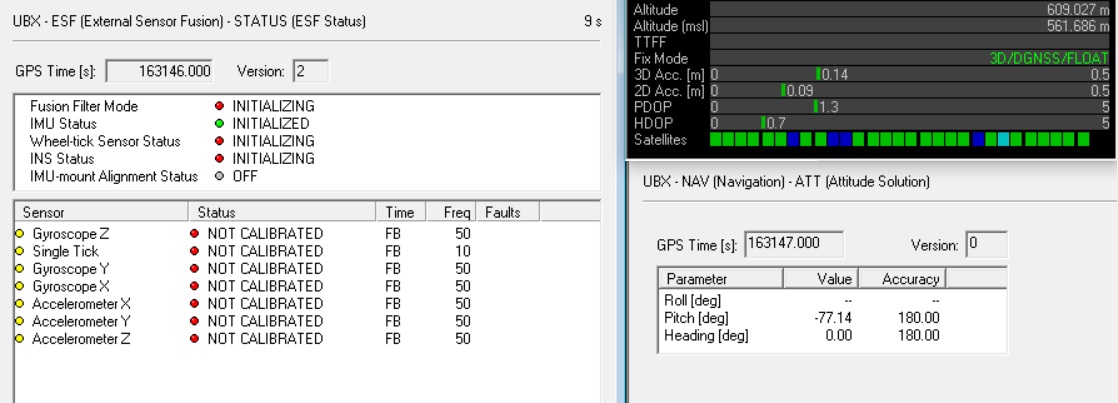
Am Anfang verhält es sich wie gewohnt ZED-F9P mit einem 3D-Fix:
Wenn Sie eingeben RTK Korrekturen erhalten Sie auch eine RTK FLOAT fix und endlich RTK FIXED-Modus.
Nach ein paar Minuten Fahrt werden die Sensoren kalibriert und Sie sehen endlich den neuen Fusionsmodus (3D+DR)!
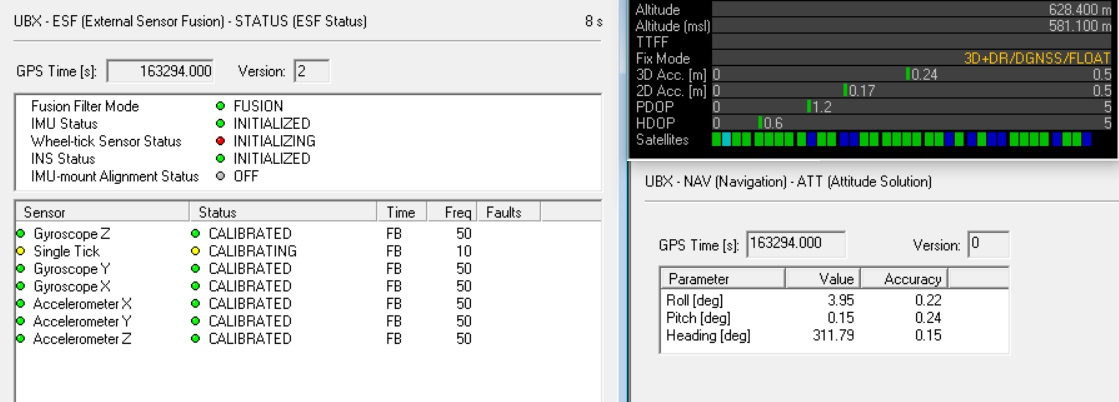
Sobald wir uns im Fusionsmodus befinden, ermöglicht uns dies auch einen neuen Anwendungsfall: Wir können in kurze Tunnel und Garagen einfahren und die genaue Position halten. Probieren Sie es aus und prüfen Sie, wie F9R in den Fixtyp „DR“ übergeht. Beachten Sie, dass die Genauigkeit im „DR“-Modus von Sekunde zu Sekunde schlechter wird.