 und
und 
Die Genauigkeit eines GNSS-Empfängers hängt von vielen Faktoren ab, zB verwendete Antenne, Fahrdynamik, Sicht zum Himmel, …
Daher sollten Sie jedes Mal, wenn Sie eine Genauigkeitszahl sehen, fragen, unter welchen Bedingungen sie gemessen wurde.
Bei diesem Test wollten wir uns auf Genauigkeit und Wiederholbarkeit konzentrieren, also haben wir einen speziellen Prüfstand vorbereitet:
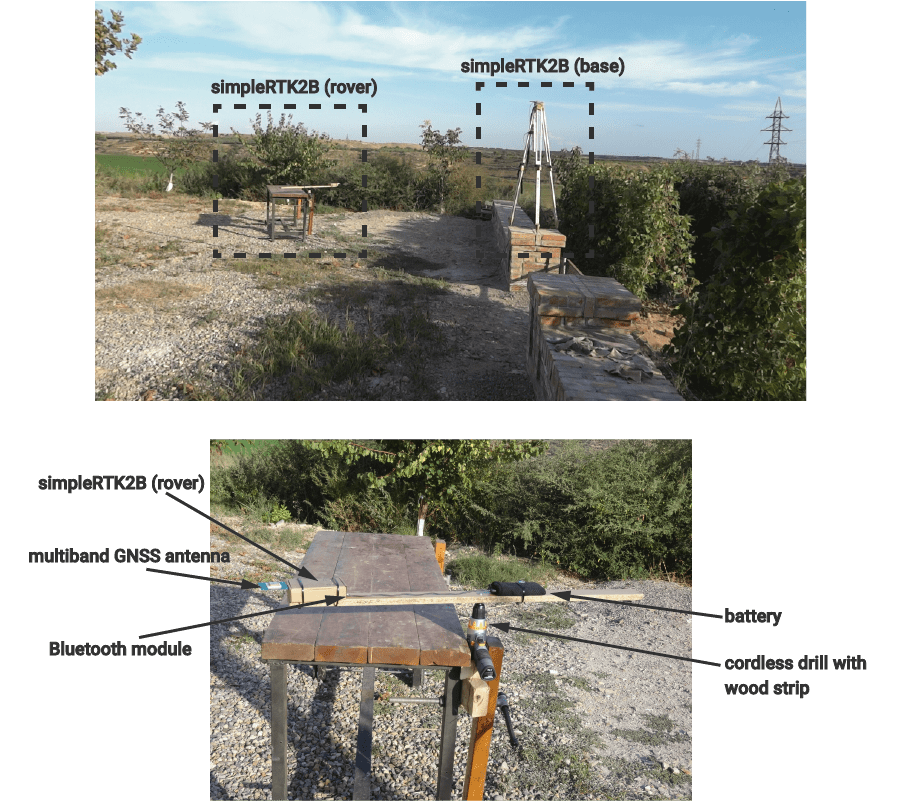
Test-Bedingungen:
- Basis und rover simpleRTK2B2B-Boards sind Prototypen
- Passive GNSS-Multibandantenne für Basis und rover.
Die letzten Antennen (sowohl OEM als auch IP65) sind aktiv und bieten einen besseren Signalempfang. - Bohrerdrehung an fester Abzugsposition, mit einer Drehzahl von ~38 U/min
- Abstand (Radius) von der GNSS-Antenne zum Bohrzentrum von 60.96 cm
- GNSS-Antennengeschwindigkeit von ~2.3 m/s
- simpleRTK2B2B arbeitet in der Basis-rover Aufbau (RTK)
- simpleRTK2B2B ist so konfiguriert, dass Daten mit 5 Hz gemeldet werden
- 41.7 Minuten Daten (12510 Punkte), einschließlich Start und Stopp der Übung.
Wenn jemand neugierig ist, kann das vollständige Protokoll des Tests heruntergeladen werden hier. - Alle angezeigten Ergebnisse haben keine Nachbearbeitung/Filterung.
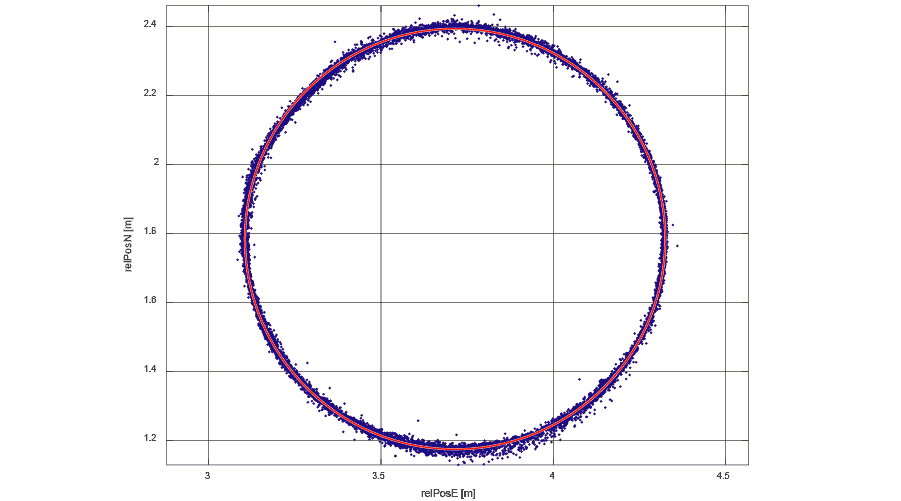
Testergebnisse, die die relative Position zur Basis (blau) und die tatsächliche Position (rot) zeigen:
Für jeden der 12510 Punkte wurde der Fehler bezüglich der realen Position berechnet und dies ist sein Histogramm PDF und CDF, angepasst an eine Weibull-Verteilung:
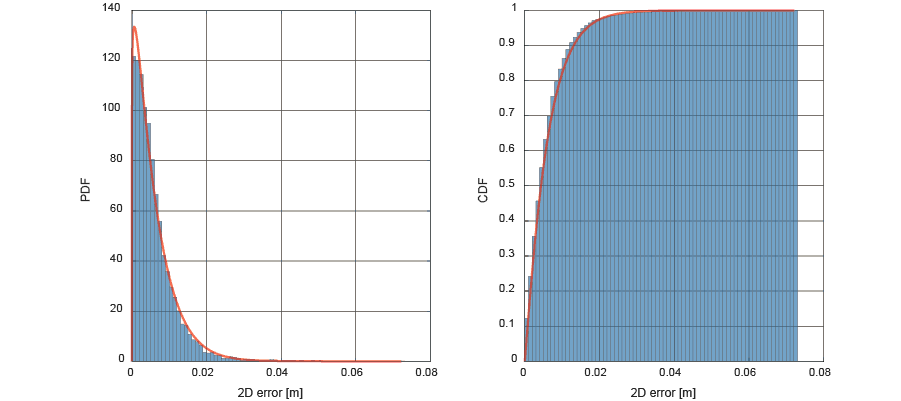
Die Genauigkeit ist:
- <7mm (~1σ, 68% der Punkte haben eine Genauigkeit besser als 7mm)
- <1.7 cm (~2σ, 95.45 % der Punkte haben eine Genauigkeit besser als 1.7 cm)
- <3.8 cm (~3σ, 99.73 % der Punkte haben eine Genauigkeit besser als 3.8 cm)
