 und
und 

Als Ergebnis werden die auf dem Server empfangenen Daten angezeigt:
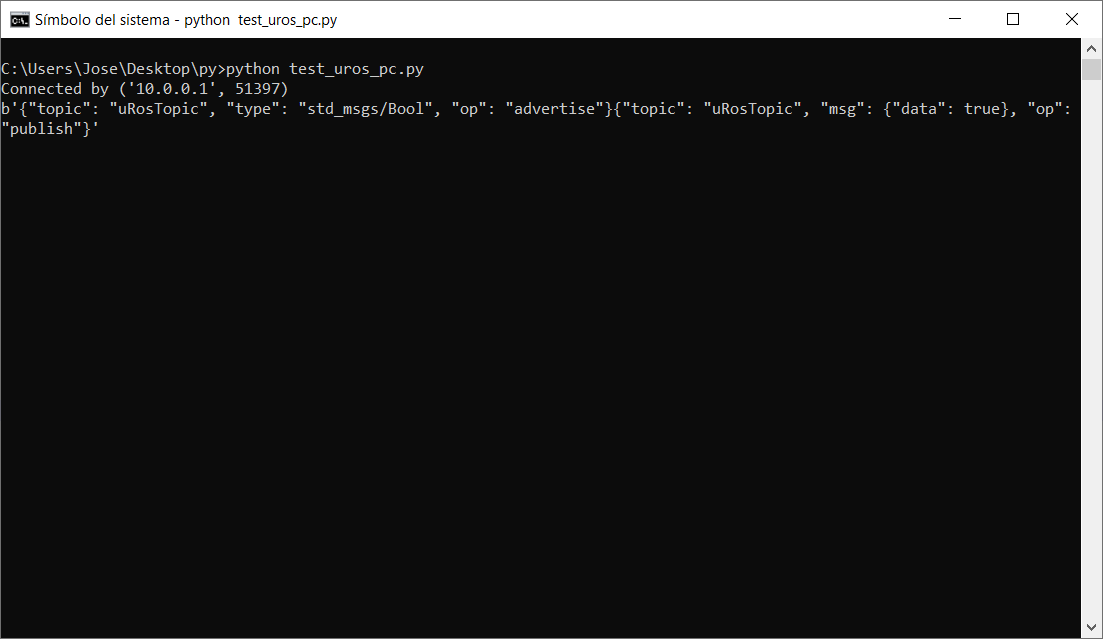
Wenn wir die Daten untersuchen, sehen wir zwei Teile:
1. Die Definition unserer uRosTopic-Botschaft. Diese wird nur einmal für jeden neuen Nachrichtentyp gesendet.

2. Und die veröffentlichten Daten. Dies wird jedes Mal gesendet, wenn wir einen neuen Wert veröffentlichen.

Jetzt können Sie Ihren SBC über Ethernet mit jedem ROS-Gerät verbinden, eine benutzerdefinierte Nachricht definieren und sie mit nur wenigen Zeilen Python-Code senden.
