 und
und 

In diesem Tutorial erfahren Sie, wie Sie die gängigsten Motortypen an den anschließen SBC. Außerdem zeigen wir Ihnen anhand einiger Beispiele, wie Sie damit umgehen. Die gängigsten Motortypen sind:
- Gleichstrommotoren sind billig und einfach zu steuern, es wird nur ein Leistungsausgang benötigt und dieser kann mit einem PWM-Signal aktiviert werden.
- Servomotoren ähneln Gleichstrommotoren, enthalten jedoch eine kleine Elektronik und ein internes Potentiometer, um einen geschlossenen Regelkreis zu bilden, mit dem der Drehwinkel gesteuert werden kann. Die Ansteuerung erfolgt ebenfalls per PWM, allerdings ist in diesem Fall das Ansteuersignal leistungsarm und die Endstufe im Stellmotor selbst integriert.
- Schrittmotoren haben mehrere Wicklungen und erfordern eine zu steuernde Sequenz, bieten dafür aber eine hohe Präzision, da sie bei jedem Umpolen ihrer Wicklungen Schritt für Schritt vorrücken.
1. Gleichstrommotoren
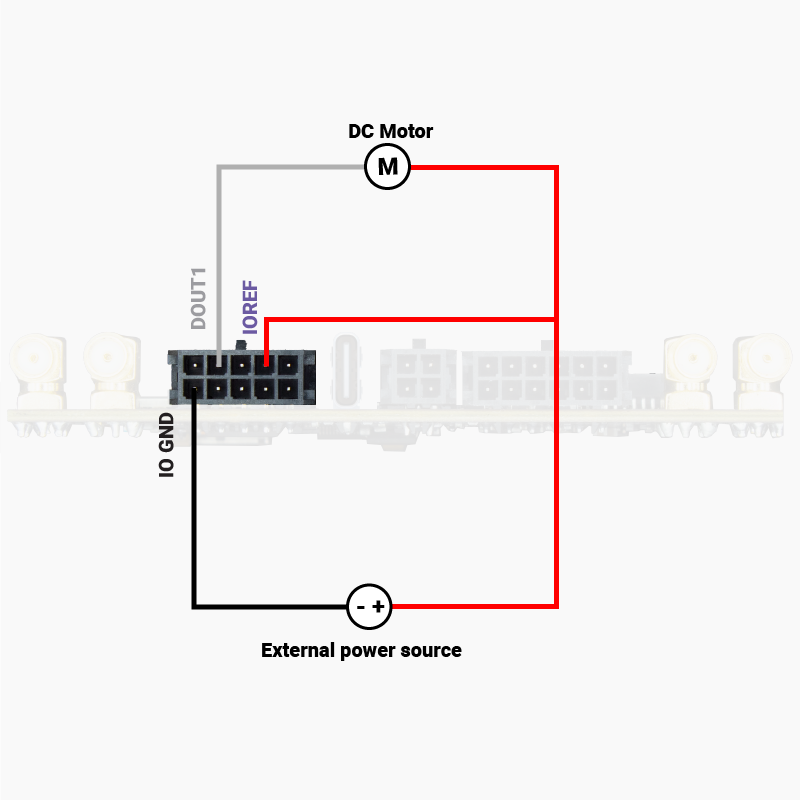
Um einen Gleichstrommotor zu steuern, schließen wir ihn an den SBC an, wie im folgenden Diagramm dargestellt:
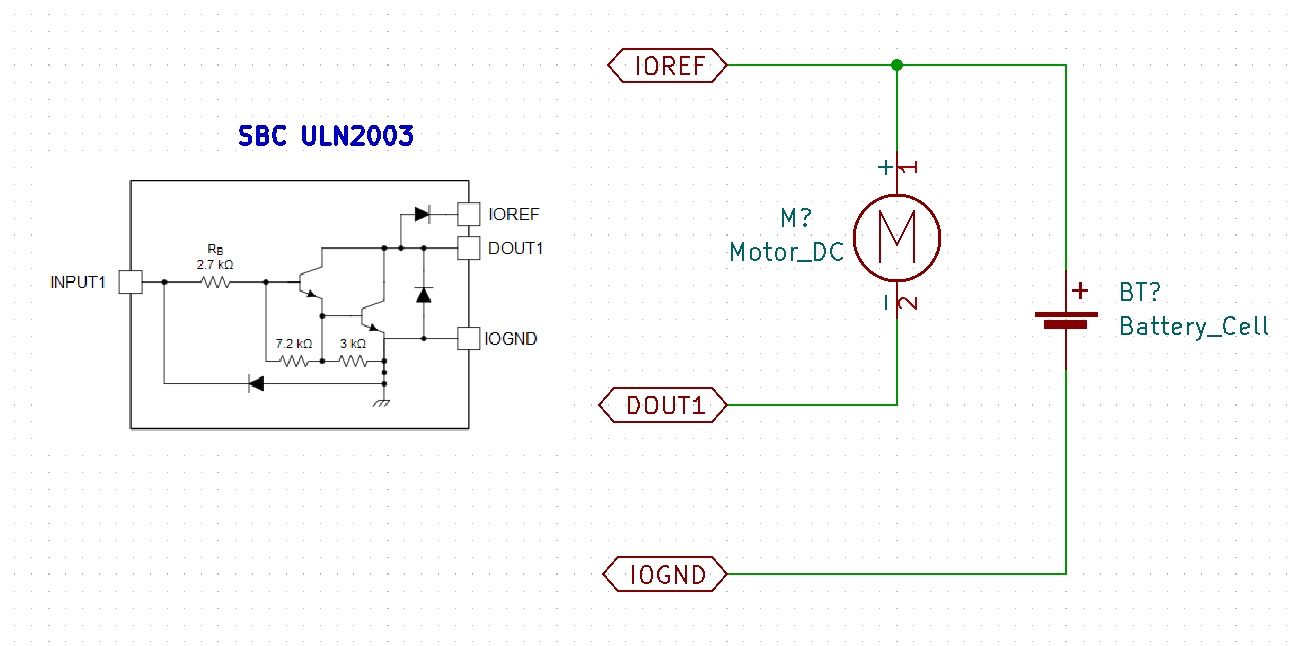
Wir müssen einige Parameter unseres Motors kennen, insbesondere die Beziehung zwischen angelegter Spannung und Motordrehzahl oder Kv.
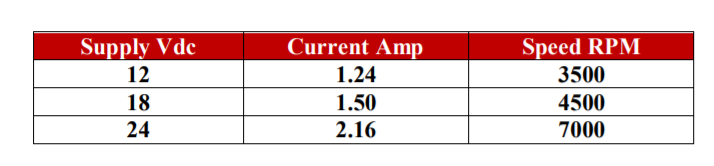
Die Dc_Motor-Klasse stellt den DC-Motor dar, der von einem PWM bei 50 Hz gesteuert wird. Wie zu sehen ist, müssen einige Parameter angegeben werden, wie die Versorgungsspannung und die Kv-Konstante, sowie der zu verwendende Pin. Dafür erhalten wir zwei Funktionen: set_voltage und set_speed.
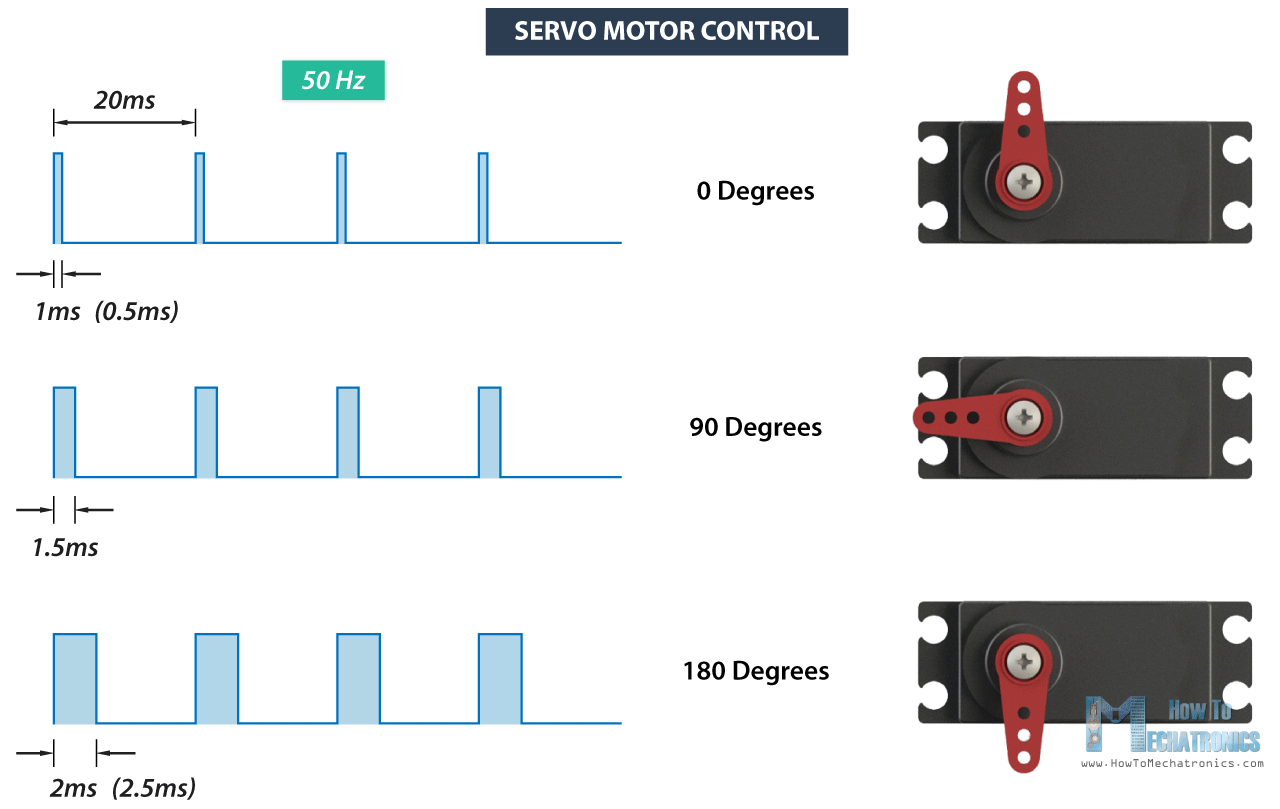
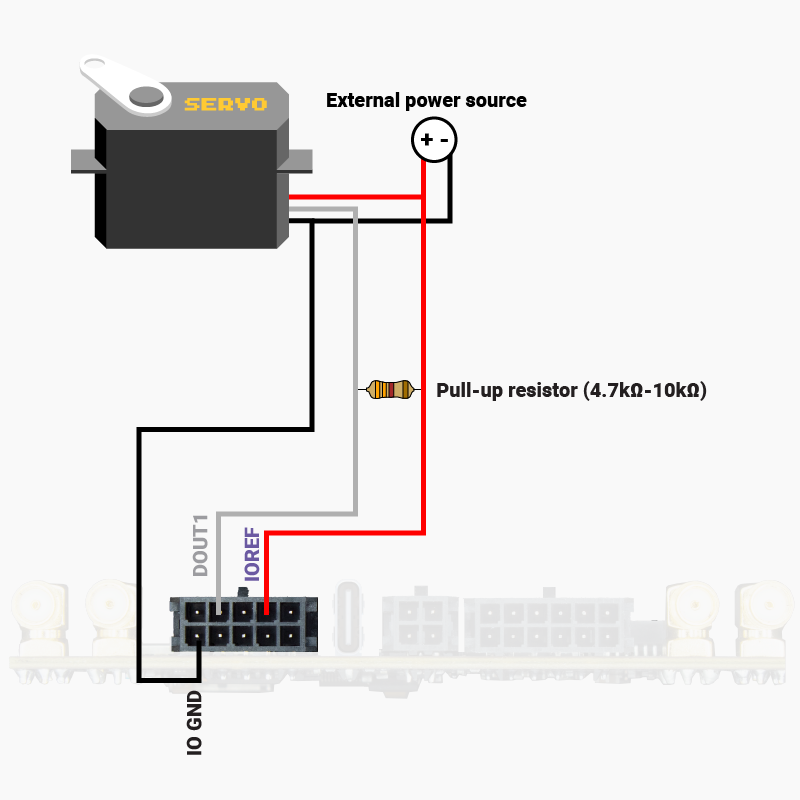
2. Servomotoren
Der Servomotor verwendet einen einzigen Steuerstift, um den Drehwinkel eines Motors zu steuern.
Der Code der Klasse Servo_Motor:
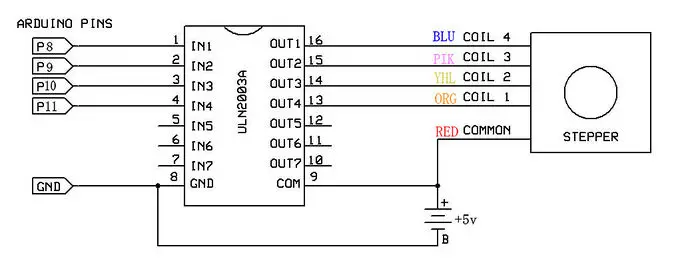
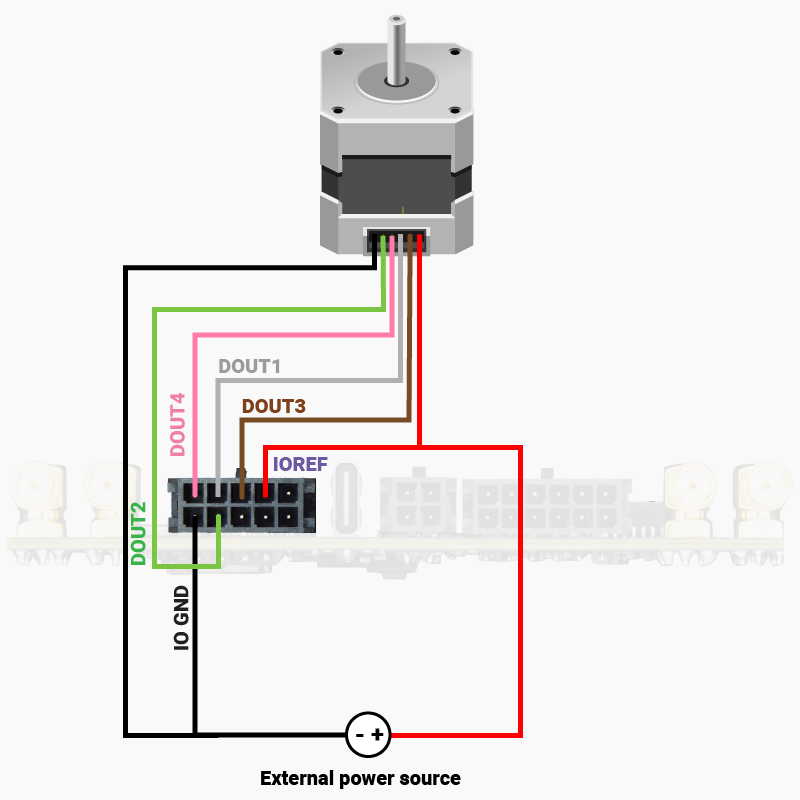
3. Schrittmotoren
Um einen Schrittmotor anzuschließen, folgen wir einem Schema ähnlich dem in der Abbildung:
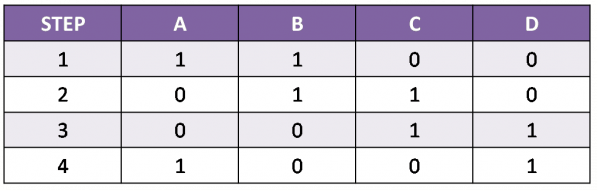
Der Klassencode Stepper_Motor ist im Grunde eine Zustandsmaschine, die die oben gezeigte Tabelle implementiert.
