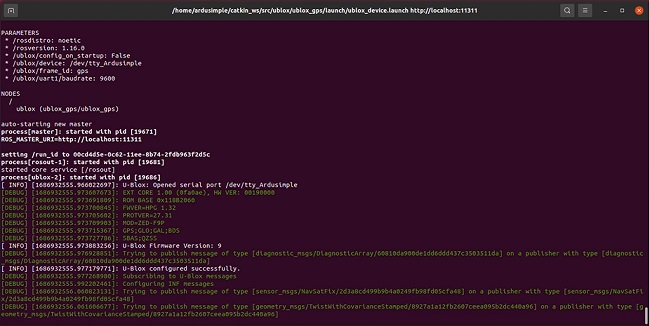
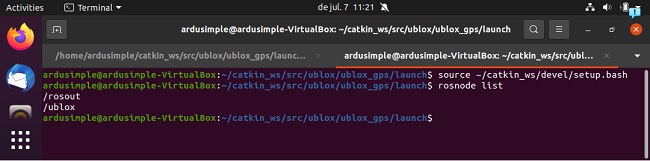
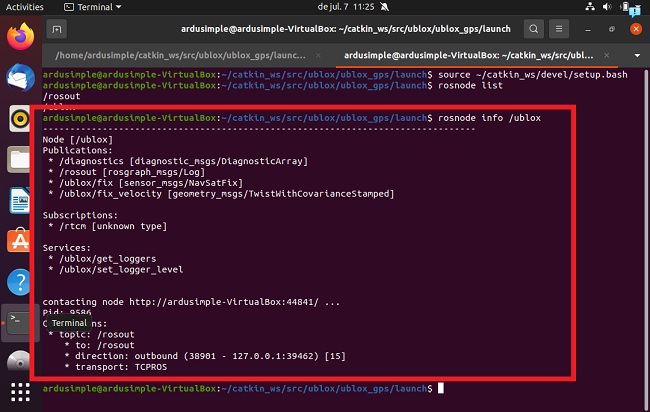
Um zu testen, ob es funktioniert, können wir die verschiedenen Themen abonnieren, die der Knoten erstellt.
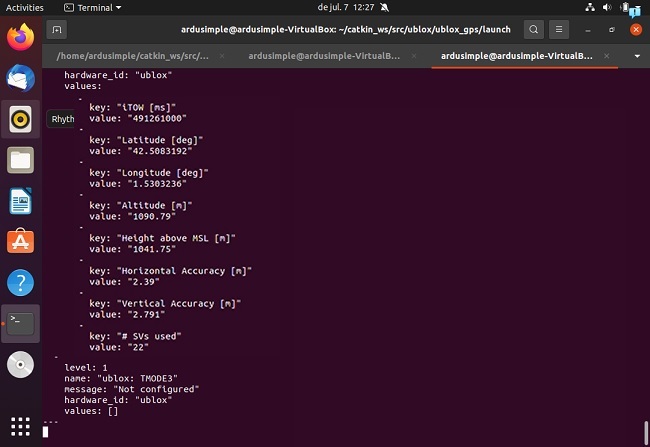
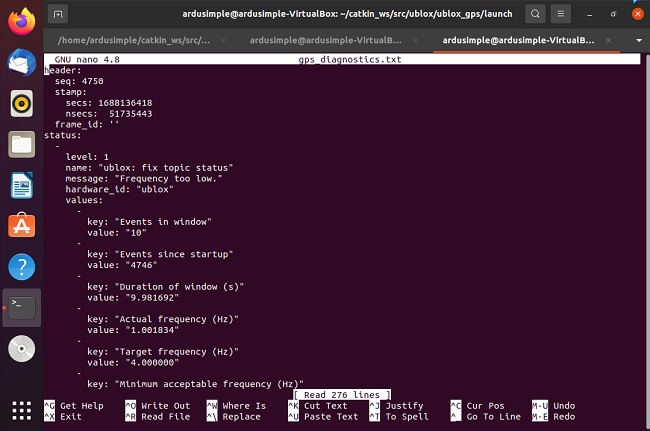
Die wichtigsten sind „/gps/fix“ (sind die Daten in WGS64) und „/Diagnose“ (Gibt uns Auskunft über den GPS-Status). Andere Daten können entsprechend der eingestellten Konfiguration veröffentlicht werden RTK Empfänger.
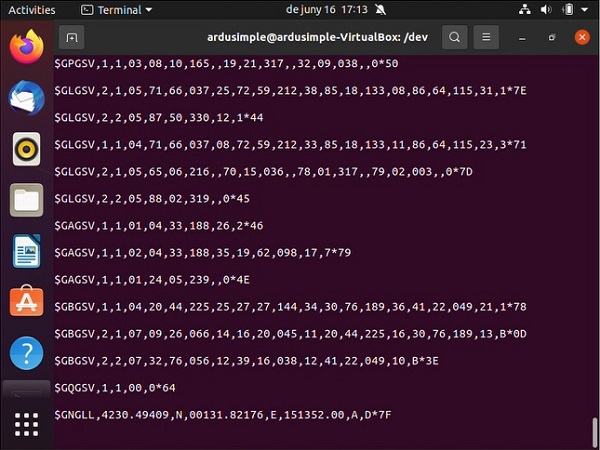
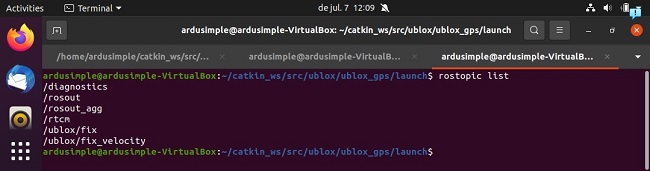
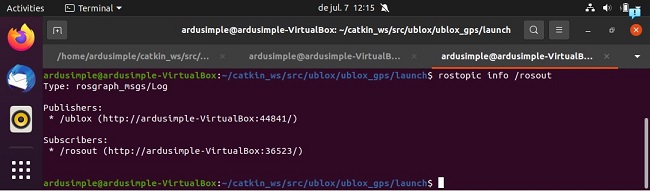
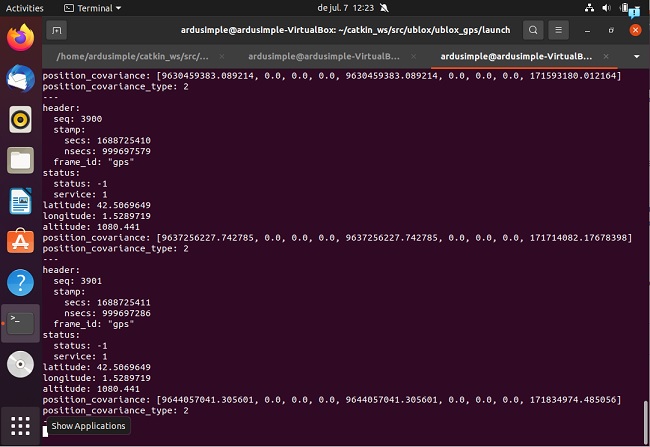
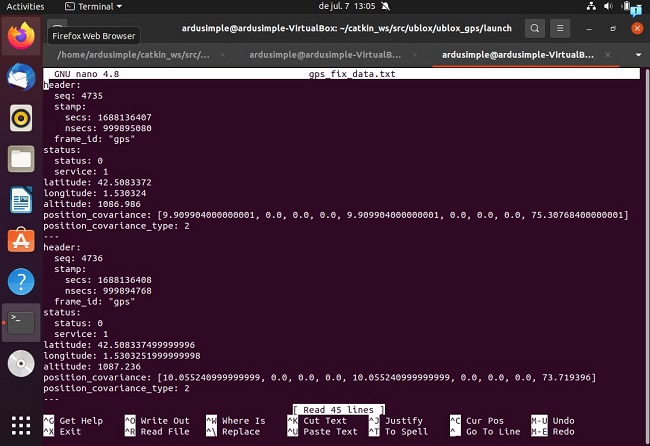
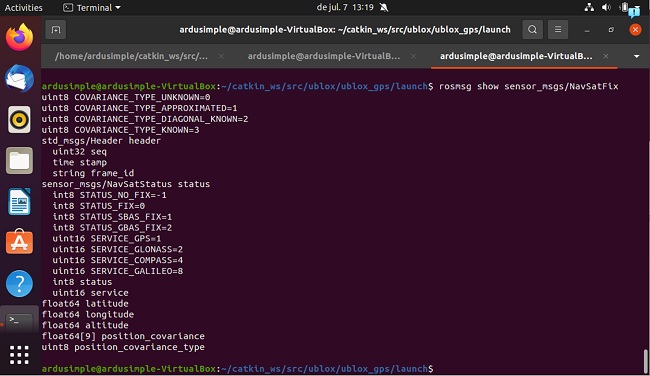
Zum Beispiel, um die veröffentlichten GPS-Fixdaten zu beobachten und zu überwachen „/ublox/fix“ Thema (sind die Daten in WGS64), wie Breitengrad, Längengrad, Höhe und andere relevante Informationen. Verwenden Sie den folgenden Befehl, um die Daten anzuzeigen:
 und
und  Jetzt shoppen
Jetzt shoppen