So stellen Sie eine Verbindung zur Basisstation her und sehen die Rover's Position in Echtzeit?
Konfigurieren Sie zunächst Ihre Rover.
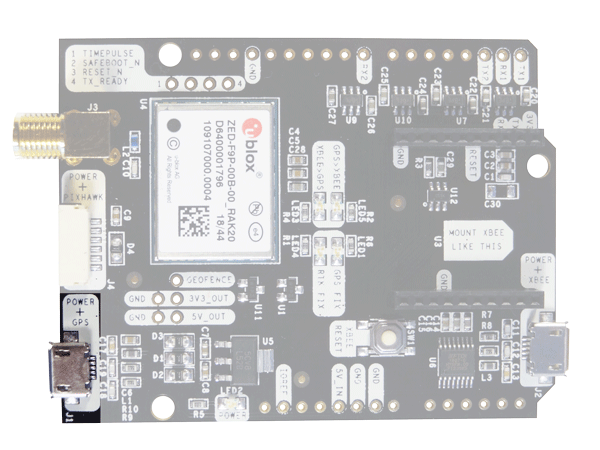
verbinden Sie Ihren Rover Verbinden Sie den Receiver mit dem mit gekennzeichneten USB-Anschluss mit Ihrem PC POWER+GPS.
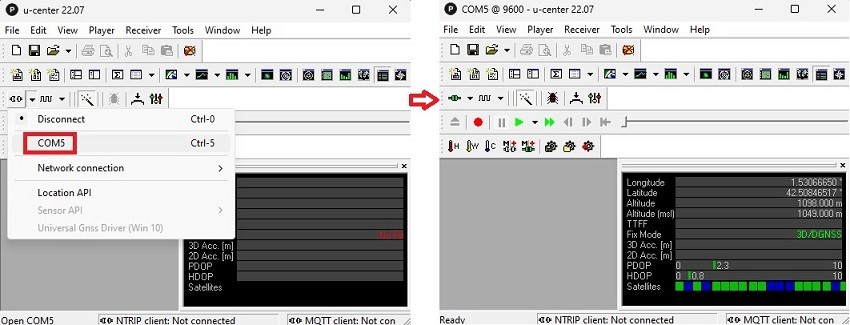
Offen u-center. Schließen Sie Ihren Receiver an u-center über COM-Port.
Laden Sie die Konfigurationsdatei mit dem Namen „ herunter.Rover sendet seine Position an die Basis zurück" von unserer Seite „Konfigurationsdateien“.. Laden Sie es auf Ihr hoch Rover. Stellen Sie sicher, dass Sie die Konfigurationsdatei herunterladen, die mit der Firmware-Version Ihres Receivers kompatibel ist. Wenn Sie nicht wissen, wie das geht, schauen Sie sich das hier an Lernprogramm.
Zweitens, gehen Sie jetzt zu Ihrer Basis.
Verbinden Sie die GNSS-Antennen sowohl mit Ihrer Basis als auch mit Rover Empfänger. Platzieren Sie die Antennen an einem Ort mit guter Sicht zum Himmel oder in der Nähe eines Fensters, um die Funktionalität zu testen
Wenn Sie Ihre Basis über den USB-Anschluss mit der Bezeichnung anschließen POWER+GPS, sehen Sie wie zuvor die Position der Basisstation.
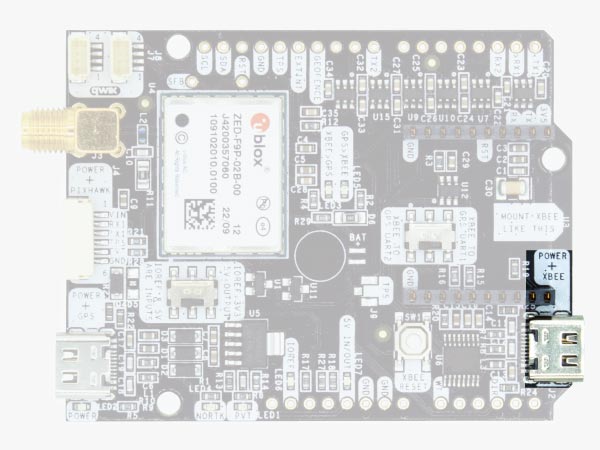
Schließen Sie Ihren Basisempfänger über den mit gekennzeichneten USB-Anschluss an POWER+XBEE.
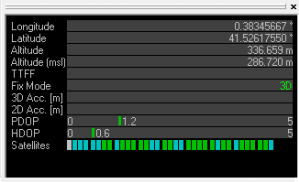
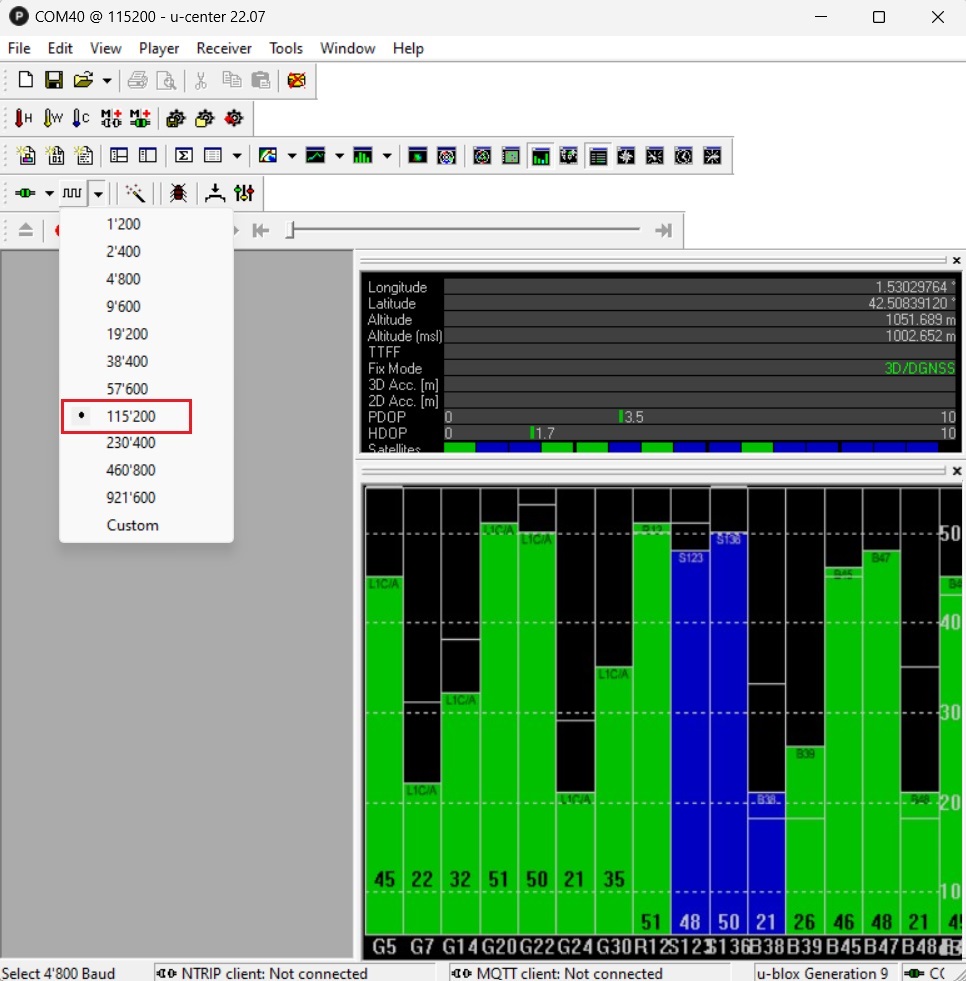
Verbinden Sie Ihren Basisempfänger mit u-center. Baudrate einstellen auf 115'200. Sie sehen die Position Ihres rover.
Wenn Sie ein Arduino-Projekt haben, haben Sie das RoverDie Position ist in den TX2- und RX2-Pins Ihrer Basisstation verfügbar simpleRTK2BBoards der 2B-Serie!
Sie werden feststellen, dass nur die Positions- und Fixstatusinformationen verfügbar sind, aber keine Informationen zu Satellitendaten. Dies liegt daran, dass die radio Die Verbindung hat eine begrenzte Bandbreite und wir können nur eine Nachricht von der Basis zur Basis übertragen rover. Wir haben die GGA-Nachricht ausgewählt, die einen guten Kompromiss zwischen Länge und Inhalt darstellt. Außerdem ist es leicht zu lesen.
Wichtiger Hinweis: Diese Konfiguration funktioniert nur mit Rover arbeitet mit 1Hz. Wenn Sie die erhöhen möchten Rover Stellen Sie bei der Navigationsrate sicher, dass Sie die GGA-Sensingrate reduzieren (UBX–>CFG–>MSG) mit der gleichen Menge, es wird also nur einmal pro Sekunde gesendet.
Jetzt können Sie Ihren Standort verfolgen Rover auf Ihrer Basis in Echtzeit!
Wenn Sie dieses Tutorial machen möchten, haben wir alle Produkte auf Lager und sind versandbereit:
Wenn Ihnen dieser Inhalt gefallen hat, können Sie uns weiter folgen Twitter, YouTube, Facebook or LinkedIn um über solche Inhalte auf dem Laufenden zu bleiben.
Hast du Fragen oder Wünsche? Kontaktiere uns! Wir antworten <24 Stunden!
1. Unser Engineering-Team wird sich mit Ihnen in Verbindung setzen, um alle Fragen zu klären
2. Wir halten Sie über Werbeaktionen und neue Produktveröffentlichungen auf dem Laufenden
3. Sie hören nur von uns, wenn wir wichtige Neuigkeiten haben, wir spammen Ihre E-Mail nicht zu
 und
und  Jetzt shoppen
Jetzt shoppen