Globale Navigationssysteme (GNSS) für den zivilen Einsatz, wie GPS, GLONASS, Galileo or Beidou, kann unter hervorragenden Bedingungen in wenigen Sekunden eine absolute Genauigkeit von etwa 1-3 Metern erreichen.
Nur unter statischen Bedingungen und nach längerer Zeit kann diese Genauigkeit auf wenige Dezimeter reduziert werden survey Zeit (24 Stunden).
Aber natürlich wollen wir eine gute Genauigkeit bei sich bewegenden Anwendungen haben 🙂
Kinematische Echtzeitpositionierung (RTK) ist eine Technik, die verwendet wird, um diese Einschränkung zu lösen.
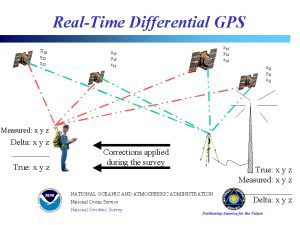
Indem wir Messungen desselben Satellitensignals von 2 nahe gelegenen Einheiten durchführen, können wir die üblichen Fehler extrahieren und eine sehr hohe relative Genauigkeit erreichen, die 5 Zentimeter erreichen kann.
Wenn wir zusätzlich die absolute Position einer Einheit (auch „Basis“ genannt) kennen, haben wir auch die Position der „Rover” mit hoher absoluter Genauigkeit.
u-blox hat ein hervorragendes 2-minütiges Video erstellt, das dies auf visuellere Weise erklärt:
Wenn Ihnen dieser Inhalt gefallen hat, können Sie uns weiter folgen Twitter, YouTube, Facebook or LinkedIn um über solche Inhalte auf dem Laufenden zu bleiben.
Hast du Fragen oder Wünsche? Kontaktiere uns! Wir antworten <24 Stunden!
1. Unser Engineering-Team wird sich mit Ihnen in Verbindung setzen, um alle Fragen zu klären
2. Wir halten Sie über Werbeaktionen und neue Produktveröffentlichungen auf dem Laufenden
3. Sie hören nur von uns, wenn wir wichtige Neuigkeiten haben, wir spammen Ihre E-Mail nicht zu
 machen
machen  Jetzt shoppen
Jetzt shoppen